
Un petit tutoriel fruit de ma maigre expérience et de quelques nuits de tâtonnements suivies d’une lecture attentive de la notice et du forum…
Normalement il faudrait faire l’inverse, mais ce ne serait plus français !
Il ne s’agit pas d’un cours magistral mais d’une porte ouverte à discussions et commentaires.
Mon matériel
– LX200 Classic,
– Astrosnap Pro v. 2.1,
– Toucam Pro modifiée,
– commande du télescope et des longues poses par deux ports USB avec convertisseurs USB/série
Introduction
L’autoguidage d’un télescope est un automatisme ; il s’agit, en termes techniques, d’une régulation de position en boucle fermée. Une petite recherche Google sur ces termes vous permettra d’en savoir d’avantage et surtout, vous fera entrevoir la complexité de ce domaine.
Voir par exemple http://fr.wikipedia.org/wiki/Automatique pour mettre des noms plus techniques sur les « yoyo » et autre « pâté» utilisés ici.
AstroSnap Pro
De nombreux logiciels permettent de réaliser un autoguidage. On peut les regrouper en trois familles :
– ceux qui ne font que ça : GuideDog, GuideMaster, PHD Guiding, Proguider,…
– les intégrés qui font de l’autoguidage et plein d’autres choses : AstroSnap, Iris, AstroArt, …
– les système propriétaires fournis avec la monture ou la caméra CCD (Meade, SBIG, …).
Certains ont des fonctions intéressantes que l’on aimerait trouver sur d’autres plus faciles d’utilisation, certains plantent le système. J’en ai essayé plusieurs avant d’arrêter mon choix sur AstroSnap que j’utilise déjà par ailleurs.
Si l’on recherche la facilité, il vaut mieux prendre l’un des logiciels qui ne font que ça. Aspro, comme son nom diminutif l’indique, prend parfois la tête…
Mais quand on aime savoir ce qui se passe, quand on a saisi la logique d’Aspro, ce logiciel, gratuit dans sa version de base et en français, est un outil puissant. L’utilisateur a la maitrise sur ce qui se passe, contrairement aux boites noires des logiciels dédiés.
Un autre bon choix sur ces mêmes critères serait AstroArt. A suivre, car il a en plus une fonction de visualisation de l’erreur du guidage (une cible) très utile.
Procédure
1) Commencer par lire ou relire tous les chapitres de l’aide en ligne d’Astrosnap et dédiés à l’autoguidage. Visiter le forum forum Astrosnap du concepteur Axel Canicio pour en savoir plus. Un grand merci en passant à ce grand nom du monde de l’astro amateur, reconnu dans le monde entier.
2) Mettre le télescope en station de la meilleure façon possible ; il ne sert à rien d’introduire des erreurs volontaires, il y en a bien assez comme ça et ça permettra de mieux faire la différence entre sans et avec autoguidage.
3) Régler la caméra et la mise au point pour avoir une image centrée, bien nette, non saturée, d’une étoile
4) Lancer un PEC (Periodic Error Correction) si la monture en est équipée.
L’autoguidage doit servir a peaufiner la stabilité de l’image quand tous les autres moyens ont été épuisés. Le but à atteindre est de limiter les corrections introduites par l’autoguidage au maximum; des corrections de moins d’un pixel à chaque retouche.
Si la préparation est trop sommaire ou si la turbulence est forte, le meilleur système d’autoguidage du monde ne pourra pas corriger correctement, essentiellement du fait de l’inertie des masses à mouvoir.
Aspro permet de voir les corrections réalisées ; si elles sont de l’ordre de 3 pixels cela signifie que chaque étoile va « barbouiller » une zone de trois pixels de plus que son diamètre instantané. Donc si elle fait 4 pixels de diamètre au départ, elle en fera 10 à l’arrivée, soit une augmentation de surface de plus de 6 fois !
5) Orienter la caméra avec la fonction « Opération / Orientation de la caméra »
Bien que le logiciel sache s’adapter à toute orientation, faire en sorte quand même que le déplacement en RA soit parallèle au grand bord de l’écran ; ce n’est probablement pas utile pour le logiciel mais c’est plus parlant
6) Le paramétrage de l’autoguidage nécessite 4 fenêtres différentes :
– Préférences / Contrôle du télescope / Interface
– Préférences / Contrôle du télescope / Vitesse des moteurs
– Fonctions / Suivi-Autoguidage
– la fenêtre « Activité » qui s’ouvre quand on sélectionne « afficher l’activité » dans la fenêtre des vitesses ci-dessus
La fenêtre « Préférences / Contrôle du télescope / Autoguidage-GOTO » ne sert à rien malgré son nom prometteur.
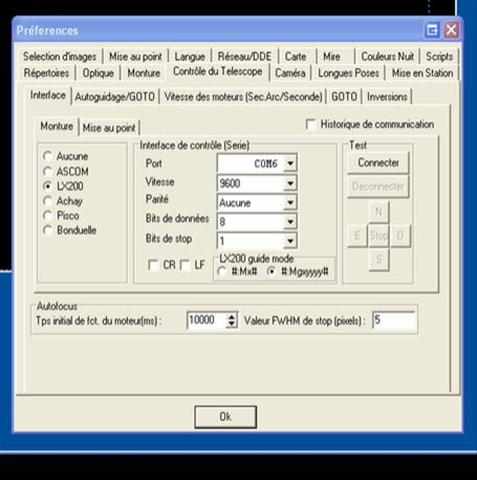
7) Ecran « Préférences / Contrôle du télescope »
a. Onglet « Interface »
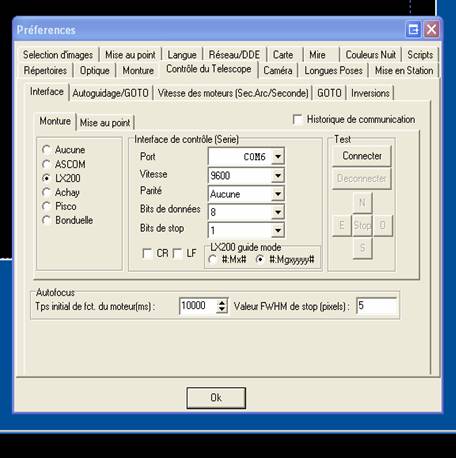
A cocher selon la monture et l’interface dont vous êtes équipés ; dans ce qui suit, c’est pour mon cas à moi, celui d’un « vrai » LX200.
Le « LX200 guide mode » doit être réglé sur « #Mgxyyyy » pour un vrai LX200 et sur « #Mx# » pour un protocole LX200.
Attention : le paramètre « #Mgxyyyy » ne se sauvegarde pas ; il faut le réinjecter après chaque démarrage.
Si l’interface LX200 ne fonctionne pas, essayer avec l’interface ASCOM.
Connecter le télescope et tester les 4 directions ; si elles ne réagissent pas dans le bon sens, les inverser dans l’onglet « Inversions »
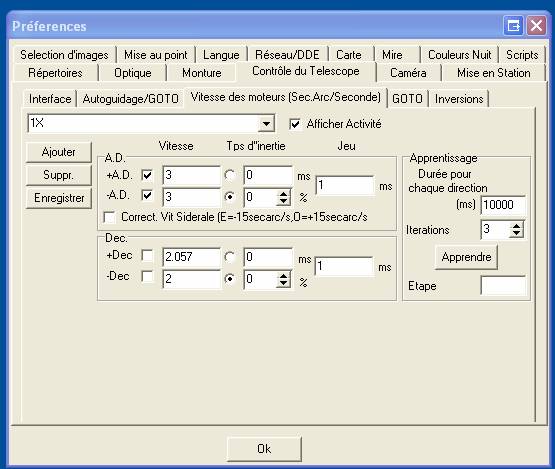
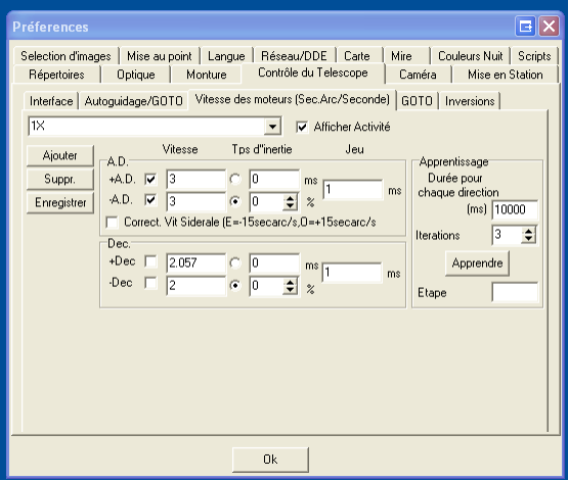
b. Onglet « Vitesse des moteurs »
{kind=link}
{kind=link}
Cette fenêtre est l’une des plus importantes ; il faut en comprendre le principe, faute de devoir tâtonner pendant des heures. C’est le moment de relire l’aide en ligne si vous ne l’avez pas encore fait 😉
– la première ligne doit être à 1X ou 2X, ce qui donne les déplacements les plus fins
La valeur « 1X » correspond à 1 fois la vitesse sidérale, ç. à d. à la vitesse normale de suivi de votre télescope.
– cocher « Afficher l’activité » pour voir ultérieurement les corrections réalisées par l’autoguidage
– Viser une étoile proche du Sud et à 0° en déclinaison et lancer un apprentissage de 10.000 ms au moins ; celui-ci va remplir les cases « vitesse » en testant la réaction de l’image de l’étoile à un cycle de déplacements préprogrammé
Cet apprentissage correspond à la fonction « Calibration » de certains logiciels.
Cette opération permet de s’affranchir du paramétrage de la focale de la lunette guide
La durée d’apprentissage dépend de la première ligne (1X, 2X, …). Si vous mettez 32X et 10.000ms il y a de fortes chances (en fonction du champ couvert) que votre étoile sorte du cadre pendant la procédure. Commencer donc par 1X et 5.000 ms puis augmenter jusqu’à ce que l’étoile parcourt un carré sympathique.
Le trajet d’apprentissage est « Ouest / Nord / Est / Sud » ; vérifier que cela correspond à ce que vous visualisez en affichant le réticule (normalement c’est le secteur en haut et à droite). Sinon inverser les directions de guidage dans l’onglet « Inversions »
Les vitesses mesurées par Aspro durant l’apprentissage ne constituent pas une référence absolue et intouchable ; c’est justement en les modifiant que nous pourrons plus tard régler l’efficacité de l’autoguidage.
– Les cases « IX, 2X, … » et « Vitesse » sont liées ; si vous faite un apprentissage à 16X et que vous revenez à 1X, les vitesses seront recalculées en proportion
– Axel dixit : « AstroSnap ne contrôle pas la vitesse des moteurs. Au contraire, il doit connaître leur vitesse pour donner des impulsions de durée correcte. Si on dit au logiciel que les moteurs tournent à une certaine vitesse, et si cette vitesse est en fait plus grande, il va donner des impulsions trop longues, et l'étoile va finir par jouer au saute moutons et complètement disparaître de l'écran.
Quand les réactions sont trop violentes il faut augmenter les paramètres de vitesse angulaire, et de la sorte réduire la durée des impulsions. »
Dans cette explication, Axel dit que Aspro ne « contrôle pas la vitesse des moteurs » ; je crois comprendre qu’il ne la contrôle pas quand il fait de l’autoguidage, mais le paramétrage « 1X, 2X, etc…) agit bel et bien sur la vitesse des moteurs, un peu comme les fonctions SLEW et GUIDE du télescope.
– Diminuer la vitesse = Augmenter la durée des impulsions
– La durée des impulsions, la fameuse « agressivité » de certains logiciels, peut être visualisée dans la fenêtre « Afficher l’activité » et dépend de la vitesse des moteurs et de la durée des impulsions.
– décocher les corrections en DEC pour commencer, se concentrer sur RA plus sensible
– quand le guidage en RA fonctionnera, cocher l’une des 2 DEC seulement : La déviation en déclinaison est due essentiellement à l'erreur de mise en station et elle est donc toujours dans le même sens. Il faut repérer, grâce à l’affichage de l’activité et en activant les deux DEC, dans quel sens le moteur doit tourner et décocher l'autre sens. Ça évite les yoyos en déclinaison.
– le temps d’inertie est réglé à 0ms et le jeu à 1ms, arbitrairement et pour commencer; seule l’une des 2 cases peut être cochée, dans l’autre il n’y a pas d’inertie, de backlash en français. Pour le DEC une seule ligne est cochée et il ne doit pas y avoir de temps d’inertie puisque le moteur est en prise toujours dans le même sens.
– A propos des inerties :
– en RA il n’y a pas d’inertie, car le moteur tourne toujours dans le même sens ; l’autoguidage envoie des impulsions qui neutralisent ou s’ajoutent aux impulsions de suivi normal de la monture,
– en DEC, il y a une inertie considérable quand on inverse le sens du moteur ; il faut éviter absolument d’entrer dans ce mode de régulation car le temps nécessaire au rattrapage de jeu est supérieur aux erreurs que nous cherchons à corriger. Tout automaticien vous dira que cela frise l’hérésie.
– La case « Correction de la vitesse sidérale » est généralement décochée ; elle ne sert que si les vitesses des moteurs en RA+ et RA- sont très différentes. Voir le forum pour plus d’informations sur la problématique de vitesses des moteurs
– On notera que la position de l’étoile guide n’est pas prise en compte par le logiciel ; si le paramétrage est réalisé à DEC 0°, il est probable qu’au zénith les réactions de l’automatisme seront différentes. Je ne sais pas si l’impact est significatif mais si les réglages sont faits pour la situation la plus critique (DEC=0°) il est probable que toutes les autres situations seront meilleures.
A vérifier. Axel nous promet une prise en compte de la déclinaison dans sa prochaine version (la 2.2)
8) Fonction « Suivi/autoguidage »
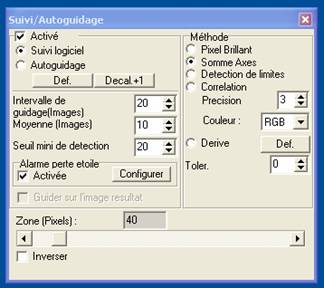
Paramètres standard 5img/s
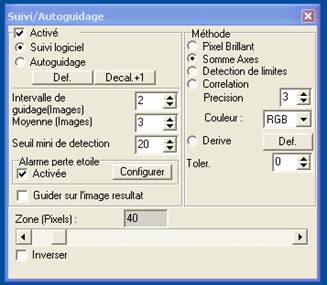
Paramètres pour longues poses
Cet écran est également très important ; il va permettre d’ajuster les paramètres d’autoguidage et doit être utilisé en conjonction avec celui sur la vitesse des moteurs.
L’intervalle de guidage est exprimé en images. Le nombre d’images délivré par la webcam sert de séquenceur, et non pas la durée d’exposition.
Une bonne valeur pour la durée d’exposition (entre deux impulsions d’autoguidage) étant de 5s environ, si la webcam tourne à 5 img/s, il faudra indiquer 25.
Si la webcam fonctionne en longues poses, il faut faire le calcul : par exemple, si la longue pose est de 500ms, indiquer 5 / 0.500 = 10
L’intervalle de guidage dépend de la nature des défauts de stabilité.
Rappelons les raisons principales pour lesquelles notre étoile à la fâcheuse tendance à gigoter sur place, à se déplacer sur l’écran, et donc à faire des pâtés en longue pose :
- erreur sur la mise en station : l’étoile dérive selon un axe bien précis, c. à d. en RA+ ou en RA- , en DEC+ ou en DEC-, mais pas les deux en même temps
- erreur périodique de la monture : l’étoile oscille sur place selon un schéma cyclique bien précis, en RA et en DEC
- turbulence atmosphérique, vent, chocs aléatoires divers, en RA et en DEC donc.
Nous avons pris le parti de ne corriger en DEC que dans un seul sens, celui induit par l’erreur de mise en station. Les erreurs en DEC dans l’autre sens, dues à la monture ou à la turbulence par exemple, ne seront donc pas corrigées.
L’erreur de mise en station est la plus facile à gérer car elle est constante; en régulation, on pourrait la corriger « en aveugle » (sans avoir de retour d’information) ou en prédictif. J’ignore si les logiciels d’autoguidage ont mis à profit ces possibilités, ce qui serait un plus car l’erreur de mise en station compte généralement pour beaucoup.
L’erreur périodique doit être réduit au maximum par une PEC préalable. Le résidu d’erreur en RA+ et RA– ainsi qu’en DEC dans un sens pourront être corrigés par l’autoguidage. A ce niveau, la correction en DEC dans un sens seulement pose un problème car, après une correction, l’étoile ne pourra pas revenir en sa position initiale. Il faut donc « espérer » que l’erreur en DEC due à la mise en station soit d’un ordre de grandeur supérieur à celui de la monture.
La turbulence est trop rapide pour être suivie avec du matériel amateur. Tout ce que l’on peut faire, c’est « l’intégrer » , se résigner au pâté résultant, et surtout s’en affranchir pour qu’elle ne vienne pas perturber les autres corrections.
A partir de toutes ces considérations, comment régler les paramètres de suivi/autoguidage ?
Commençons par traiter la turbulence : pour « intégrer » les images il y a deux solutions :
- faire la somme d’images successives (case « Moyenne »)
- travailler en longues poses
J’ai opté pour cette solution, même si l’étoile est visible en 5 img/s.
Pour cela, je pointe mon télescope vers l’objet convoité, webcam en longues poses (1s par exemple), gain à fond, j’ai beaucoup de chance de trouver une étoile dans le champ de la webcam guide. En plus de cette facilité d’emploi très importante, l’accumulation physique des photons me semble aussi meilleure qu’une moyenne calculée d’images.
L’intervalle de guidage est proportionnel à la durée des impulsions : à priori, si vous corrigez toutes les 10 s, la durée d’impulsion sera 10x plus longue que si vous corrigez toutes les secondes (si l’erreur provient de la mise en station uniquement).
La durée de l’impulsion calculée par Aspro (et indiquée dans la fenêtre d’activité) ne doit pas être supérieure à l’intervalle de guidage, sinon la monture recevra une nouvelle impulsion avant que la précédente ne soit traitée.
L’intervalle de guidage est proportionnel à l’écart en pixels (indiquée dans la fenêtre d’activité). Tout est là : le jeu consiste à réduire cette valeur au maximum, en jouant sur l’intervalle de guidage et la vitesse des moteurs. Le minimum qui peut être atteint dépendra des conditions locales, de la turbulence. Si vous avez une FWHM instantanée de 4 et des corrections de 1, votre FWHM en longue pose sera dégradée à 6.
Le réglage de la vitesse des moteurs intervient si les durées des impulsions sont trop importantes et dépassent l’intervalle de guidage.
De la même manière, si la durée des impulsions est manifestement trop faible pour ramener l’étoile à la bonne position, il conviendra de diminuer la vitesse (et donc d’augmenter la durée des impulsions). Il faut tâtonner un peu en observant bien l’activité des moteurs et le résultat obtenu à l’écran.
Pour la moyenne, mettre la même valeur que le nombre d’images de façon à « intégrer » la turbulence.
J’ai obtenu de bons résultats en longues poses (1s) en mettant un intervalle de guidage de 2 (soit 2 secondes) et une moyenne de 3 images. Ainsi la moyenne prend en compte une image de la séquence précédente, ce qui revient à « prédire » le déplacement. Ca marche bien si l’erreur provient surtout de la mise en station, cas le plus courant.
Renseigner le seuil de détection (la valeur peut être comprise entre 0 et 255 ; mettre 20 ou 30) et activer l’alarme perte d’étoile.
La « méthode » est sélectionnée selon ce que l’on veut imager ; voir le tutoriel intégré de Astrosnap. Dans le cas classique du suivi sur une étoile, la somme des axes fonctionne bien, surtout en longues poses. La corrélation est plus performante mais consomme beaucoup de ressources processeur.
Et quand tout ça est fait, on place le réticule sur le centre de la mire et on clique sur « Activé » et « Autoguidage ». Puis on surveille ce qui se passe à l’écran et dans la fenêtre d’activité.
Contrôle d’efficacité
Dans tout montage d’automatisme il est essentiel de savoir si c’est mieux avec ou sans !
Nous pouvons utiliser divers outils pour cela, avec et sans autoguidage :
- placer le réticule sur l’étoile guide, attendre une minute et voir ce qui se passe,
- prendre une longue pose de la durée souhaitée pour les futures images et voir ce que ça donne,
- lancer la procédure « Opérations / Aide à la mise en station » pour visualiser les corrections suggérées,
- lancer la procédure « Fonction / Mise au point » et visualiser le FWHM de l’étoile guide. En longue pose, il devrait se réduire de manière significative
- lancer la procédure « Operations / Erreur périodique » mais elle n’est pas très performante en temps réel sur Aspro (d’où mes essais à venir avec AstroArt)
Conclusions
Près de 10 pages pour expliquer l’autoguidage, nous ne sommes plus dans le logiciel convivial et ergonomique, mais c’est le prix à payer!
Et quand ça marche, au moins on sait pourquoi. Dans le cas le plus courant, on ne sait pas pourquoi ça ne marche pas…
Commentaires, questions, débat WELCOME, rdv sur notre forum ASTROCOOLPIX favori.
(Denis J.)