
1200 vues pour la première version
CE TUTORIAL EST OBSOLETE: Veuillez vous rendre à https://astrolabo.synology.me/?p=1563 pour la dernière version.
Avantages de GuideMaster sur GuideDog:
– la calibration donne une idée claire du backlash et de la vitesse et sens des déplacements,
– meilleur contrôle ensuite sur les paramètres de vitesse des moteurs (le Long AD et Long.DE),
– possibilité d’activer l’autoguidage les directions choisies,
– la visualisation de la performance par la cible et surtout par les 2 graphes horizontaux qui sont identiques à des graphes de PEC, en RA et en DEC,
– l’agressivité dynamique.
Conseils
Pour trouver le paramétrage au poil, il faut commencer par évaluer l’épaisseur du poil que l’on veut (ou plutôt peut) atteindre
Pour cela:
– ne pas lancer l’autoguidage de suite, observer ce qui se passe sur la cible, les graphes, l’évolution des écarts.
Ca va donner des indications sur:
– la turbulence,
– le sens général de la dérive en non guidé
Si la turbulence est de +/-1 « , paramètrer le logiciel pour qu’il n’effectue des corrections qu’à partir de 1 ». Sinon on chasse la turbulence. De toute façon on ne pourra pas faire mieux que cet écart.
Si on peut, utiliser une webcam longue pose, même si l’étoile est assez lumineuse; utiliser une vitesse de 0,5s (ça va intégrer la turbulence).
Quand le sens de la dérive est bien évident, lance le guidage. Le logiciel va essayer de ramener l’étoile à son point de départ. Observer les carrés verts de direction N et S. Regarder lequel s’allume. Désactiver la correction sur le sens qui ne s’allume pas. Très important: le rattrapage de jeu en autoguidage c’est mission impossible.
Il est possible qu’en cours de soirée le sens de dérive en DEC s’inverse (passage au zénith); s’ajuster en conséquence.
Si le logiciel ne ramène pas tout de suite l’étoile en DEC, attendre un peu, il est peut-être en train d’avaler le jeu.
Observer ensuite comment les valeurs d’écart fluctuent autour du zéro, avec les carrés verts dans le coin de l’oeil pour ne pas mélanger les changements dus à la turbulence et ceux dus aux correction d’autoguidage.
Dans la zone -1″ à +1″ (d’après l’exemple ci-dessus), les carrés verts ne s’allument pas. En dehors de cette zone, observer de combien l’autoguidage ramène l’étoile. Il faut qu’elle soit ramenée de l’autre côté du zéro.
S’il apparait sur la cible au bout de quelques minutes que l’autoguidage est incapable de la ramener de l’autre côté du zéro (nuage excentré), c’est que l’action n’est pas assez énergique.
Le paramétrage de base étant:
– agressivité à 100% sur les deux axes,
– agressivité dynamique ON (attention elle se remet à OFF quand on arrête l’autoguidage)
on ne peut pas jouer sur l’agressivité pour obtenir une action plus puissante.
Il faut alors changer la valeur du paramètre Long. AD ou Long.DEC dans le menu « Vecteurs ». Attention, pour plus d’action il faut diminuer la valeur Long., et pas l’inverse.
Tous ces essais seront conduits avec les graphes bien en vue de façon à évaluer l’efficacité des actions correctives au fur et à mesure. GuideMaster a l’avantage de donner le graphe DEC.
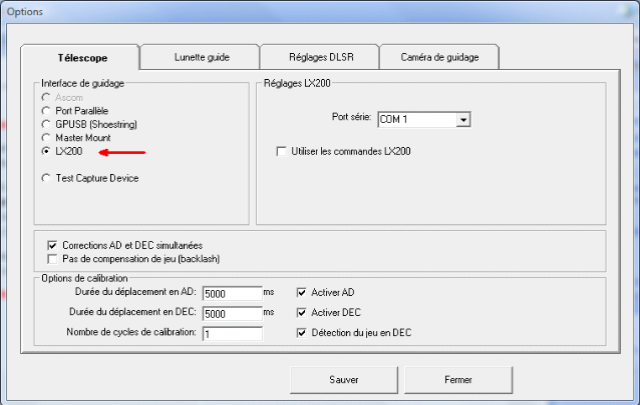
– utiliser le protocole LX200 mais avec la case « Utiliser les commandes LX200 » décochée
– dans Telescope/Options de calibration, les temps de déplacement doivent être adaptés à la focale. Avec 600mm mettre 15000ms (je dis bien 15 secondes) pour AD et DEC,
– désactiver les backlash correction, en autoguidage et en calibration tant que ça ne marche pas à peu près bien,
– lancer la calibration avec une seule étoile à l’écran, bien lumineuse et bien centrée
– une règle d’or: jamais d’étoiles saturées pour le guidage.(Le centroide, c’est le « centre de gravité lumineux » de l’étoile. Chaque pixel a un « poids », de 0 à 255, on en calcule le « barycentre ». Les pixels saturés, à 255, sont des pixels de « poids infini », et les formules de calcul digèrent ça très mal)
Une configuration qui fonctionne bien: (99.9% des impacts dans la cible de 5as)
temps maxi de déplacement: 500ms
vitesses d’autoguidage 1.25X (1.25X-0.25X en AD, +-0.25X en Dec)
résolution de la cible 5
agressivité dynamique cochée
agressivité AD et Dec à 90%
corrections de tous les écarts (sans tolérance de 1″ par exemple)
Site de Guidemaster: http://www.guidemaster.de/
Guidemaster est un logiciel de guidage automatique d’un télescope sur monture équatoriale à l’aide d’une webcam. Le logiciel est capable de piloter la monture selon différents protocoles.
– ASCOM
- à l’aide d’un port série http://ascom-standards.org/
– Port parallèle
- pour cela vous aurez besoin d’une boîte à relais qui sera branchée sur le port parallèle.
- Vous pouvez vous la fabriquer selon http://www.guidemaster.de/interface.asp
- Ou l’acheter ici http://www.store.shoestringastronomy.com/gpint_pt.htm
– GPUSB (Shoestring)
- A l’aide d’un port USB
- http://www.shoestringastronomy.com/
- http://www.store.shoestringastronomy.com/products_gp.htm
– Mastermount
- A l’aide d’un controleur Mastermount. Il s’agit d’un contrôleur développé par Matthias Garzarolli, Volker Pritsching et Bernhard Liebscher. Il offre la possibilité de positionner la monture très précisément à l’aide de micro-pas
– LX200 (Meade)
- Port série
- Vous pouvez aussi utiliser le port parallèle pour la commande des webcams modifiées longues poses. Il est aussi possible de commander par ce port l’obturateur des APN tels que les EOS de Canon.
Nous dégageons toute responsabilité pour les dommages que ce logiciel pourraient causer au PC ou au télescope.
Exigences système :
– 300 MHz / espace disque 128MB
– Windows 2000 / Windows XP
– Webcam USB (avec modification)
– ASCOM, si vous utilisez ce protocole (téléchargez la dernière version http://ascom-standards.org/download.html)
– Pilote de webcam
– Pour Windows XP il faudra vous connecter comme Administrateur.
1. Mise en station
Le télescope doit être mis en station très précisément. Plus la MES sera précise et moins il sera nécessaire de corriger en déclinaison. Re-vérifiez les réglages après montage du télescope. Souvent ils se dérèglent avec le chargement. En particulier si le sol n’est pas très ferme (prairie, gazon, etc…)
La moindre erreur de MES se traduit toujours par une rotation du champ; plus ou moins importante bien sûr selon l’erreur.
Et ça, l’autoguidage ne sait pas le corriger entièrement.
Dans une dérive d’étoile due à une mauvaise MES il y a deux composantes :
– une translation, en crabe, que l’autoguidage gère bien à coup de poussettes perpendiculaires,
– une rotation, contre laquelle il n’y a pas de solution simple (il faudrait faire tourner le porte-oculaire)
Heureusement, le gros morceau c’est la translation, mais pour des poses de 5 min à 2000mm de focale, la rotation peut devenir gênante.
Le résultat c’est que toutes nos étoiles vont tourner autour du point fixe que constitue l’étoile guide.
Si on a choisi une étoile guide au plein milieu de la zone à imager, les dégâts seront faibles. Si on est allé chercher une étoile à 2°, gare à la MES. Surtout aux longues focales.
Donc, si vous avez crû que vous alliez faire l’économie d’une bonne MES, vous avez tout faux….
2. Branchement de la webcam et réglage des paramètres
Branchez la webcam et saisissez ses paramètres. Dans le menu « Caméra », démarrer la webcam avec « Démarrer la webcam» (si vous utilisez DirectX, le nom de la webcam est indiqué) au cas où elle n’aurait pas démarré automatiquement. Ci-dessous un exemple avec la webcam Philips SPC900NC.
Des essais avec différents temps de pose (5img/s ou poses de 1s par exemple) donnent les mêmes résultats, contrairement à ce que la théorie prévoit. C’est toujours la problématique turbulence/vitesse/temps de réaction: on ne peut pas chasser la turbulence.
Ce qui semble important c’est d’avoir une étoile guide bien contrastée. Si les bords en sont trop flous, les calculs du centroide sont moins précis.
Vitesse Recommandation : 10 img/s.

Quand vous utilisez DirectX, vous obtenez d’abord la boîte de dialogue suivante :
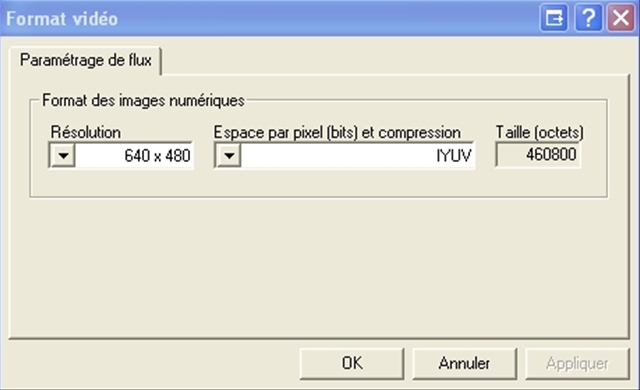
Recommandation : Régler la résolution sous DirectX ou VideoforWindows à la valeur maximale (640 x 480).
3. Réglage des options
-
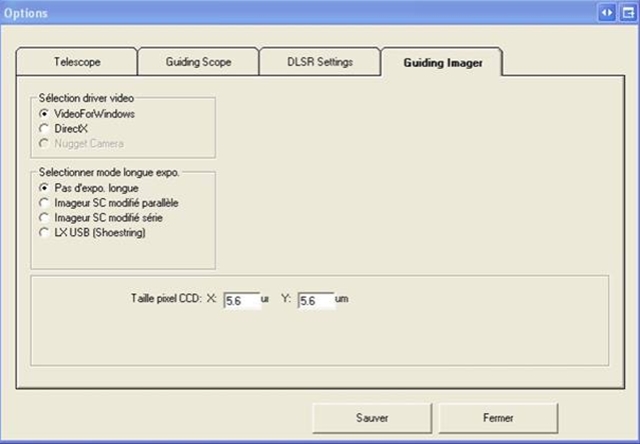
a) Options de la webcam
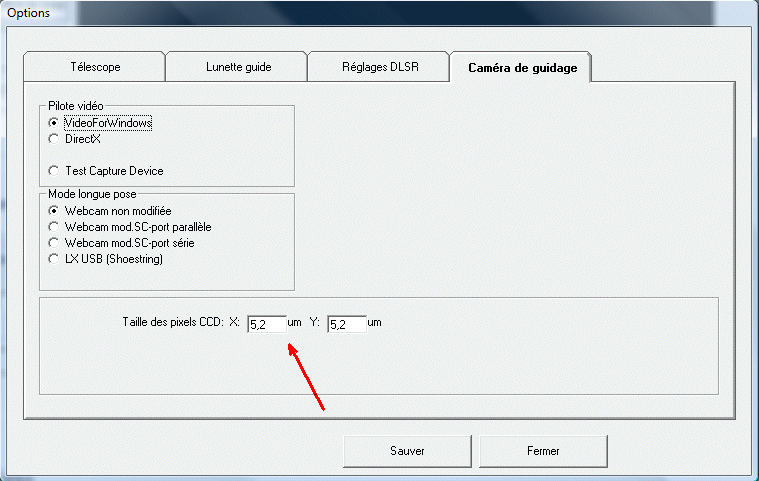
Dans le menu « Réglage / Caméra de guidage» , choisissez votre webcam. S’il s’agit d’une webcam non modifiée, cochez « Webcam non modifiée ».
Choisissez le pilote vidéo, VideoForWindows ou DirectX.
Recommandation : VideoForWindows
Sous « Taille des pixels CCD », indiquez la taille des pixels du CCD en microns.
Par exemple Toucam modifiée SC capteur N&B 7,4 x 7,4 – Vesta Pro 5,2 x 5,2
-
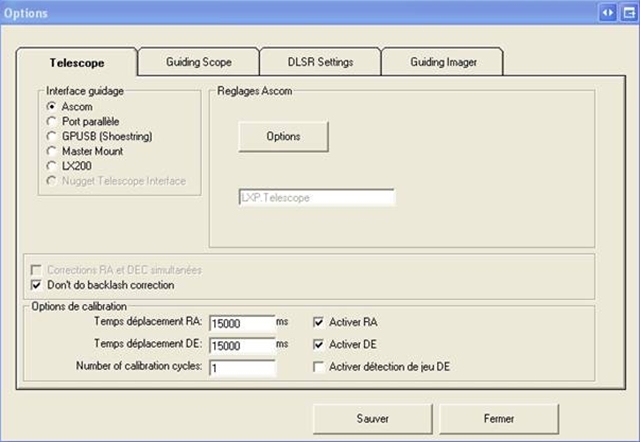
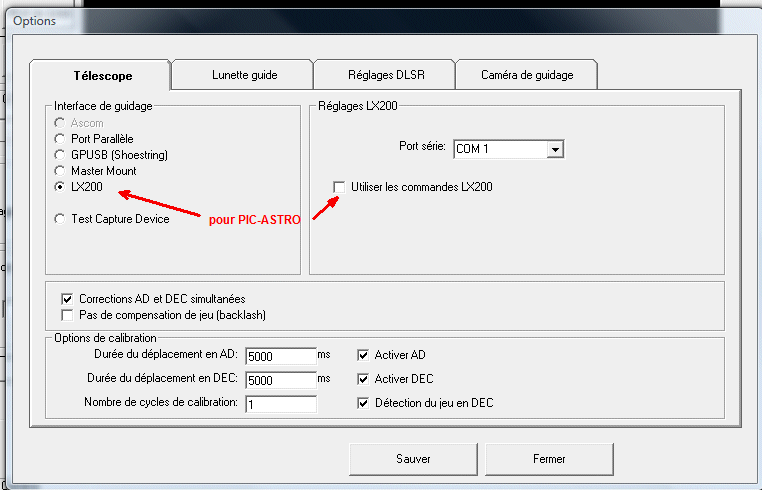
b) Options du télescope
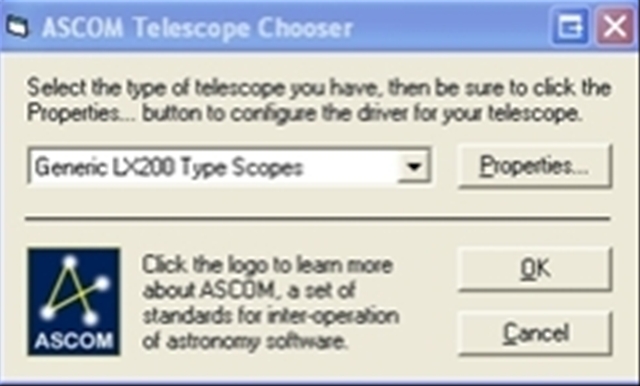
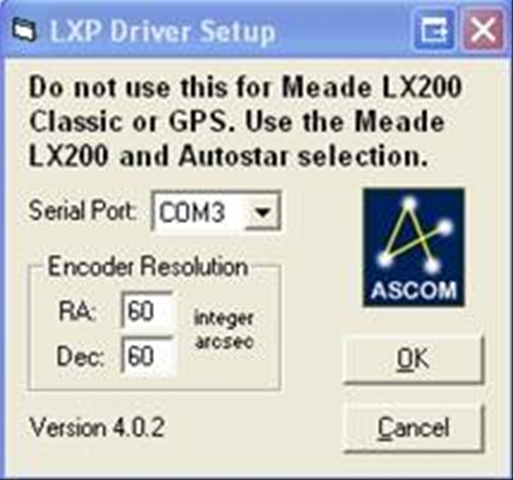
Choisissez ici l’interface de guidage de votre télescope. Pour l’interface LX200, indiquez le numéro du port série sur lequel votre télescope est branché. Accessoirement vous pouvez activer ici « Utiliser les commandes LX200 ». Il s’agit de commandes de type « :Mgn2000# » par lesquelles la monture prend en charge le timer, mais cette fonction n’est supportée que par un très petit nombre de montures.
Pour PIC-ASTRO et les versions V2_40 et supérieures il faut la cocher cette case. Les corrections d’autoguidage n’en seront que plus précises
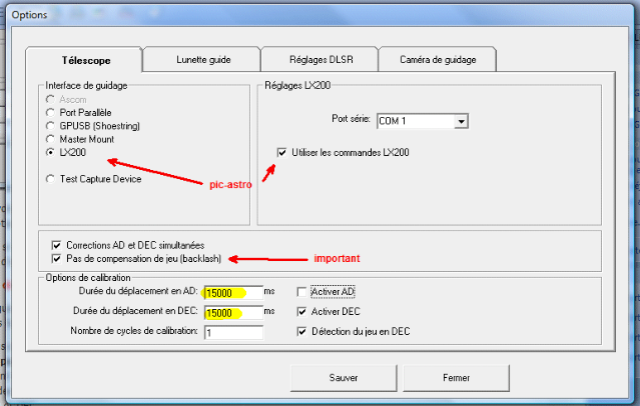
Corrections AD et DEC simultanées : si votre monture n’est pas capable de gérer les corrections simultanées, désactiver cette option.
Pa de compensation de jeu (backlash) : si vous ne souhaitez pas activer le rattrapage de jeu, activer cette option. Cette option sera d’ailleurs bientôt retiré du logiciel.
Recommandation : cocher la case « Pas de compensation de jeu (backlash)».
La valeur de backlash, en millisecondes, indique combien de temps la monture met pour réagir quand on inverse le sens de Nord vers Sud (ou inversement).
Options de calibration : Indiquez ici si vous souhaitez activer/désactiver la calibration sur les axes RA et DEC ainsi que le rattrapage de jeu en DEC. Les temps de déplacement correspondent à la durée durant laquelle le télescope sera déplacé durant la phase de calibration. Ne descendez pas en dessous de 5000 ms. Avec 600mm mettre 15000ms (je dis bien 15 secondes) pour AD et DEC.
En phase de calibration Guidemaster va envoyer pendant ce temps un ordre dans une direction. Au bout de ce temps le logiciel va analyser le déplacement de l’étoile sur l’écran.
Guidemaster veut que ce déplacement fasse entre 4 et 100 pixels. Si le temps est trop bref (déplacement de moins de 4 pixels ou trop long ( plus de 100 pixels) Guidemaster s’arrête.
Si votre télescope/monture a un jeu plus important, augmentez un peu cette valeur. Durant la calibration, le jeu sera défini. Si vous voulez qu’il soit corrigé a été défini ci-dessus.
Recommandation : utilisez les options de calibration comme indiqué sur l’image.
LX200 setup
ASCOM setup
Port parallèle setup
![]()
GPUSB (Shoestring) setup
![]()
Mastermount
![]()
-
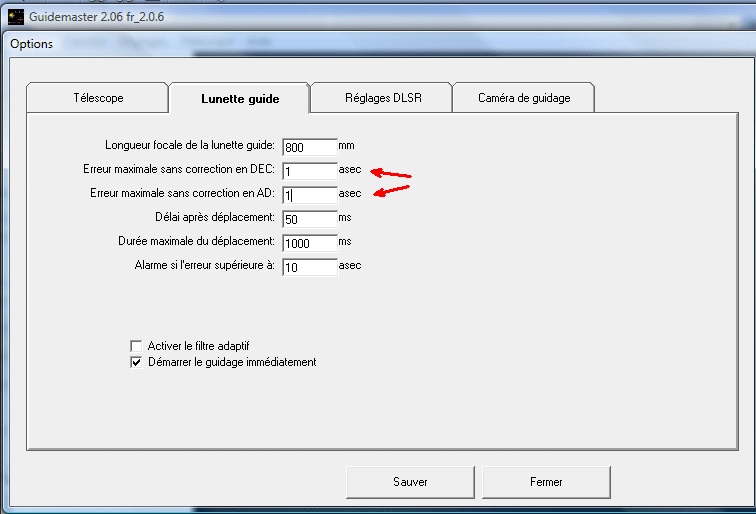
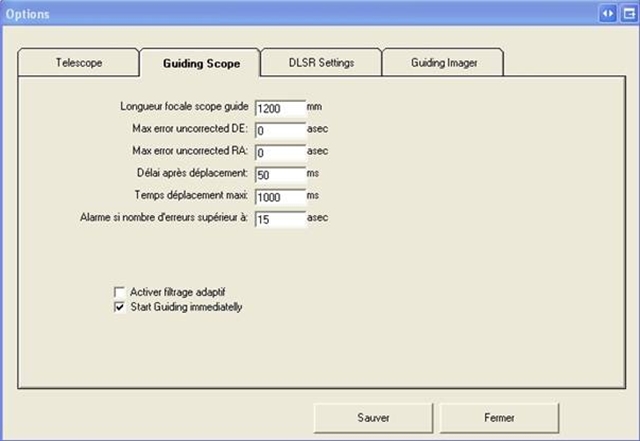
C) Lunette guide
Indiquez ici la longueur focale de la lunette guide.
Erreur maximale sans correction: écarts, en arc sec, qui ne seront pas corrigés. Mettre 1, cela évite de corriger la turbulence.
Puisqu’on ne peut pas chasser la turbulence (postulat de base en guidage), commencer par en définir l’amplitude et limiter les corrections de guidage à ce qui dépasse l’amplitude de cette turbu (typiquement 2″).
De plus, définir arbitrairement l’erreur max non corrigée (2 asec par exemple) et observer les petits carrés verts de correction. Normalement ça ne devrait pas corriger plus de une fois toutes les 2 secondes. Si ça clignote AD+/AD- sans arrêt, c’est qu’on chasse la turbulence. Augmenter alors la valeur. Ce réglage doit être modifié en cours de soirée si les conditions de turbu changent.
Délai après déplacement : une petite pause est faite après chaque déplacement, avant que l’image suivante de la webcam soit traitée, au cas où la monture se balancerait encore un peu.
Durée maximale du déplacement : il s’agit de la durée maximale d’un déplacement du télescope. Si ce temps est dépassé, une nouvelle image de la webcam est utilisée. Ceci est destiné à éviter, en cas d’apparition de nuages par exemple, des pixels chauds soient confondus avec des étoiles et que le télescope soit laisser libre de ses déplacements. Ceci ne vaut que pour le guidage, pas pour la calibration. Ce paramètre ne sert qu’en sécurité pour éviter que le système ne s’emballe. Il est signalé qu’il est possible de diminuer l’incertitude de guidage en modifiant la valeur (300ms)
Alarme si l’erreur supérieure à : alarme sonore. (0 désactive l’alarme). Il s’agit du bip généré par le haut-parleur de l’unité centrale (pas de wav ni de mp3)
Démarrer le guidage immédiatement: après appui sur le bouton « Guidage », le guidage démarre immédiatement. Si ce n’est pas souhaité, décocher la case.
-
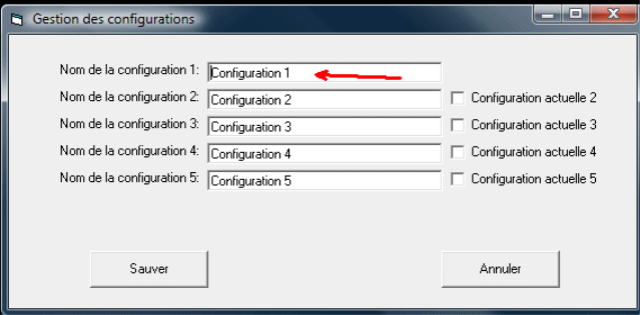
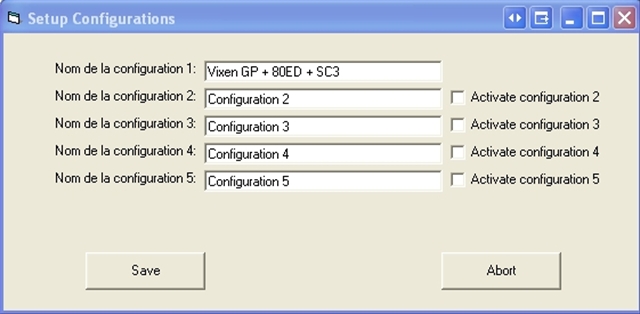
d) Configurations (menu Réglage/Configurations)
Vous pouvez ici nommer, enregistrer et réutiliser plusieurs configurations (jusqu’à 5).
-
e) Divers (menu Réglage / Options / Guiding Scope)
Dans l’écran « Autoguidage », cochez la case « Fichier data » permet de sauvegarder les données de guidage.
Des explications sur la structure des données sont données plus loin.
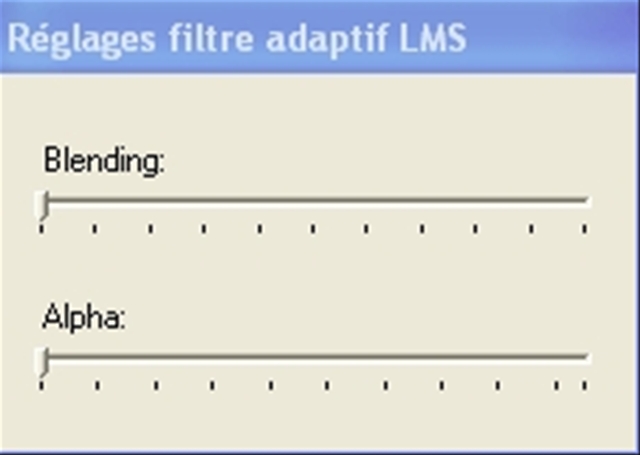
Activer filtrage adaptatif
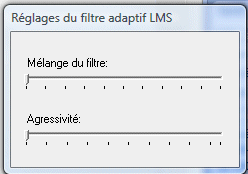
Le filtre prend les corrections passée en RA et ajuste le filtre FIR (Finite Impulse Response ) de manière optimale pour mieux distinguer le bruit d’erreurs réelles, sans que cela ne cause de dérive dans le temps .
Le filtre a besoin de 30 à 60 secondes pour s’adapter (avec une durée d’exposition de 1 seconde), bien que cette durée d’adaptation dépende aussi du facteur Agressivité.
Curseur Mélange du filtre à « 0 » : le filtre est désactivé
Curseur Mélange du filtre à « 100 » : le filtre est à plein effet.
Le curseur Agressivité permet de régler l’agressivité avec laquelle le filtre s’ajuste. Une bonne valeur de départ est de 70.
Le filtre peut devenir instable, quand on a de grandes corrections en AD et que Agressivité est réglé sur 100.
Si le filtre devient instable, pas de panique, désactiver simplement le guidage et réactiver, ce qui efface les coefficients du filtre.
Recommandation : désactiver
-
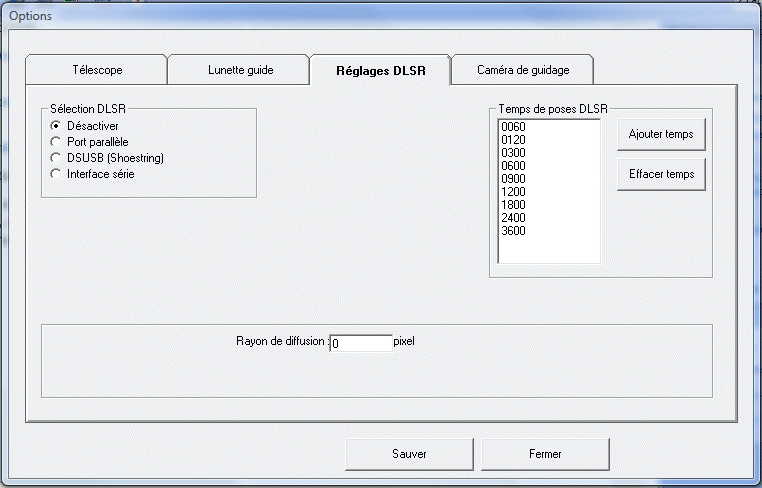
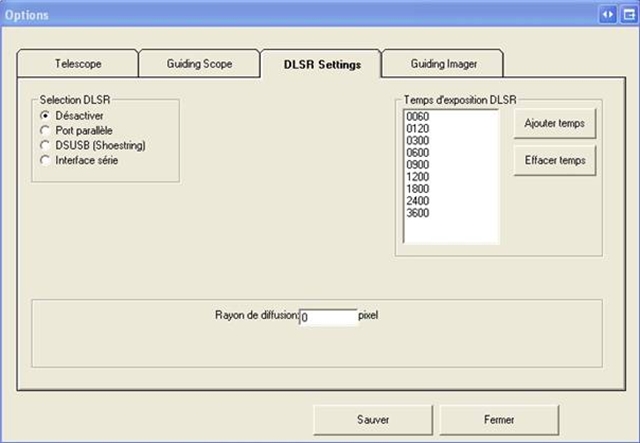
f) Réglages DSLR
Selection DSLR : indiquez ici comment l’APN est raccordé.
Port parallèle voir http://www.guidemaster.de/interface.asp
DSUSB (Shoestring) : voir http://www.store.shoestringastronomy.com/products_ds.htm
Interface série: voir http://www.beskeen.com/astro/serialDSLRcontrol/SerialPortControlCables.htm
Temps de poses DSLR : vous pouvez choisir ici les temps d’exposition ou les effacer
Rayon de diffusion : indique de combien de pixels en AD et DEC sont écartés après chaque prise de vue. Dans un champ de N x N pixels, une fonction aléatoire balaie le champ. Ca fonctionne automatiquement quand un APN est raccordé, sinon vous pouvez entrer la valeur manuellement.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4. Réglages Vecteurs
Vous pouvez voir ici les valeurs fournies par la calibration. Voir plus loin.
5. Connexion du télescope
Avant de calibrer ou de guider vous devez connecter le télescope.(Menu Télescope)
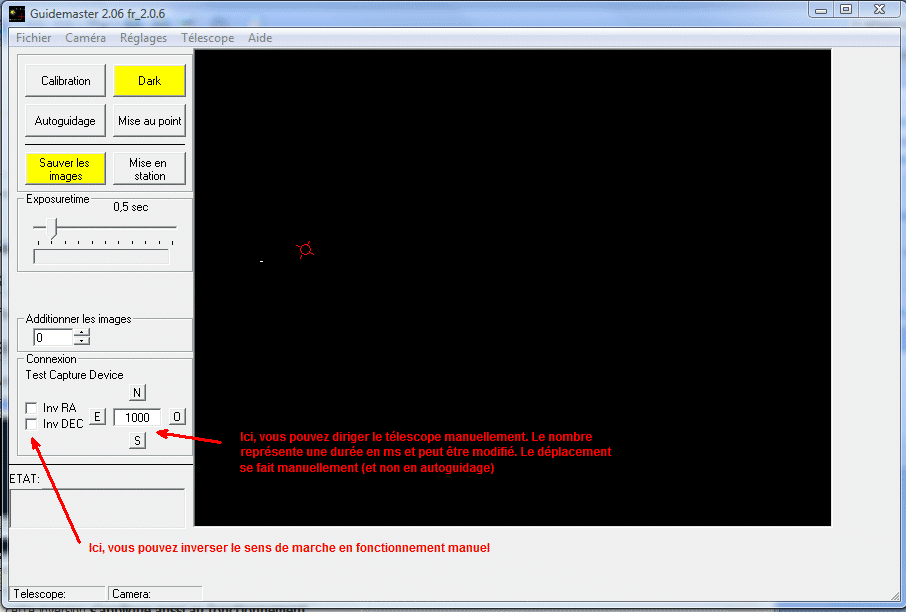
Quand on inverse les directions, cette inversion s’applique aussi au fonctionnement automatique.
Cette fonction est intéressante car elle évite d’avoir à recalibrer après une inversion de la monture. Toutefois, pour certaines montures, il faut quand même inverser une ou deux directions (du fait de la calibration, cette fonction n’est pas réellement nécessaire).
6. Calibration
Après avoir dirigé la lunette guide vers une étoile, vous lancer la calibration de l’ensemble Télescope/Monture.
Après avoir appuyé sur le bouton « Calibration », la boite de dialogue suivante apparaît :
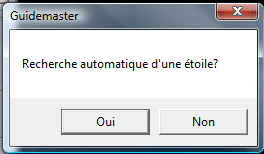
Vous pouvez laisser le programme rechercher l’étoile guide automatiquement ou en choisir une avec un clic de souris.
Dans un premier temps, le télescope est envoyé vers le Sud. Puis le programme recherche automatiquement une étoile guide. En recherche manuelle vous devez cliquer sur l’étoile choisie.
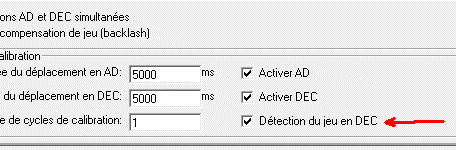
Si l’option « Réglage/Options/Télescope/Détection du jeu en DEC » est activée, le télescope se déplace plusieurs fois dans différentes directions selon la séquence suivante : N, N, S, S, W, E, N.
Si l’option est désactivée, le télescope se déplace vers N, S, W, E.
Si vous avez opté pour la sélection manuelle de l’étoile guide, vous devez re-identifier l’étoile après chaque déplacement.
Après une calibration réussie, l’écran suivant apparaît:
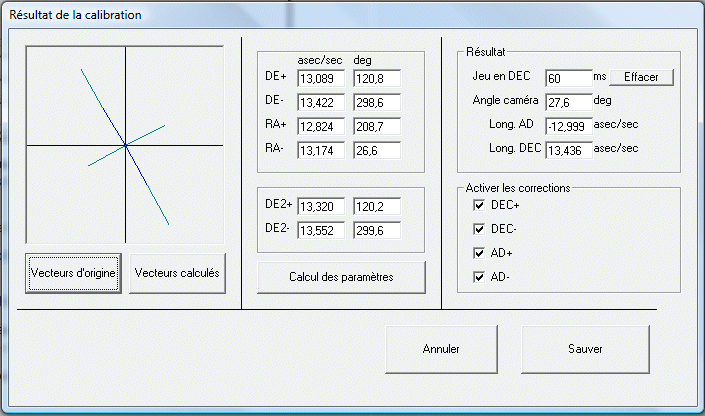
Après cela vous pouvez visualiser les résultats de la calibration : les vecteurs d’origine et les vecteurs calculés. Voir l’écran « Réglages/Vecteurs ».
Dans « Résultats » vous trouvez le jeu DE en ms, l’angle de la caméra, la longueur des vecteurs AD et DEC.
Le champ central donne les valeurs mesurées pour chaque déplacement individuel :
Les vitesses AD+ et AD- (et DE+ et DE-) doivent être identiques. Ce qui est rarement le cas quand on laisse faire Guidemaster, du fait du backlash essentiellement.
Le champ de droite donne les valeurs calculées à partir de ces mesures.
Jeu sur l’axe DE en millisecondes= durée avant que le mouvement démarre.
L’angle de la caméra est donné en degrés.
La longueur des vecteurs AD et DEC est la distance parcourue en arc.secondes/seconde.
Le logiciel calcule les vitesse angulaires en arc.sec/sec à partir de son petit trajet de calibration. Mais, quand on connait exactement ses vitesses, il vaut mieux les injecter directement à la main dans cet écran. Le tout étant de les calculer.
Les valeurs entrées dans PIC-ASTRO sont des multiplicateurs de la vitesse sidérale (15 arc sec/sec), avec la petite subtilité en AD :
– 1,5 en AD signifie que le télescope corrige à 0,5x la vitesse sidérale, soit 7,5 asec/s
– 0,5 en DEC signifie … la même chose, soit 7,5 asec/s aussi
Dans Guidemaster, il faut rentrer ces valeurs en arc.sec/s dans la vitesse (remplacer les résultats de la calibration par ces valeurs).
Attention à conserver les valeurs angulaires quand même, puis cliquer sur calculer. De plus, il faut tenir compte de la déclinaison de l’étoile guide et corriger la vitesse AD en conséquence
Activer les corrections
Permet d’activer/désactiver l’autoguidage sur les différents axes. On peut ainsi demander au programme de ne corriger la déclinaison que dans une seule direction.
Les valeurs indiquées peuvent être rejetées ou sauvegardées. Si elle sont sauvegardées, elle seront utilisées pour l’autoguidage.
Si vous interrompez la calibration, le déplacement en cours est quand même conduit à son terme.
Attention de ne pas cocher DEC+ et DEC- en même temps, il ne faut cocher qu’une des 2 cases.
Quand faut-il calibrer ?
Obligatoirement quand la webcam est bougée.
Pour certains télescopes, la direction DE doit être inversée ou recalibrée, quand on change l’orientation du tube de l’Est vers l’Ouest ou d’Ouest en Est.
Il peut être avantageux de recalibrer quand on photographie un autre objet, par exemple quand on photographie un objet proche de l’équateur et que l’on passe à un objet proche du pôle, ou inversement, car ceci affecte la longueur des vecteurs.
7. Guidage
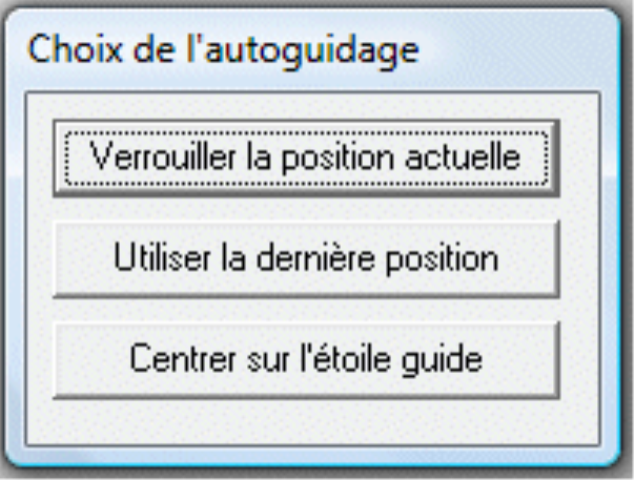
Une action sur le bouton « Autoguidage » fait apparaitre la fenêtre suivante :
 ou
ou
– Verrouiller la position actuelle
Vous choisissez une étoile guide et le programme se cale dessus
– Utiliser la dernière position
Fonction très importante, quand on a terminé/interrompu le guidage, on peut le reprendre à partir de la même position
Centrer sur l’étoile guide
L’étoile guide est amenée au milieu de l’écran de la webcam. Alors commence le guidage.
Chercher une étoile guide assez lumineuse pour pouvoir suivre à 5 im/s, avec un gain autour de 20%-25% et une luminositée affichée par Guidemaster entre 1.5 et 3 (pour ne pas saturer le capteur). Ainsi l’étoile guide est seule sur l’écran avec un fond bien noir.
Recommandation : Essayez de choisir l’étoile guide la plus proche du centre !
Après avoir choisi l’une de ces options, la fenêtre de contrôle du guidage apparaît.
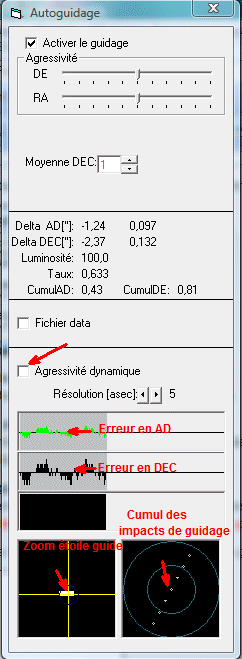
Si vous avez coché la case « Démarrer le guidage immédiatement » dans le menu « Réglages/Options/Lunette guide», le guidage démarre instantanément. Si ce n’est pas le cas, activer le guidage manuellement en cochant la case « Activer le Guidage ».
Quand le guidage est désactivé, vous pouvez observer les corrections produites par la combinaison Télescope/motorisation/monture/trépied.
Agressivité : Il s’agit de l’intensité de la correction.
Le programme calcule, le moment et la durée des impulsions de correction, pour aller de la position actuelle à la position cible. Avec 100% le déplacement se ferait en une seule fois, mais comme les vecteurs ont toujours une petite erreur, et aussi parce que le seeing a une influence,utiliser toujours une agressivité plus petite. Choisissez donc une agressivité pas trop forte, sinon votre système se mettra à osciller. La valeur va de 0 a 100.
Recommandation : 30 en DE et RA
Moyenne DE / Moyenne AD : on définit ici sur combien d’images de la webcam est calculée la moyenne servant à calculer la position. Le moyennage démarre de suite. Ne pas moyenner est équivalent à « 1 ».
Recommandation : 1
Agressivité dynamique: L’idéal est de cocher « agressivité dynamique » et de mettre les agressivités AD et DEC au maximum. Ca permet d’avoir de grands déplacements quand on est loin du centre, et de petites corrections quand on s’en rapproche. Ensuite, pour encore adoucir les réactions, on peut diminuer ces agressivités.
Attention, l’agressivité dynamique dépend de la valeur de la cible (5 ou 10 par exemple vont faire réagir le système différemment).
Lors du guidage ou de l’observation, les valeurs suivantes sont calculées et affichées :
Delta AD (‘’) : erreur actuelle (écart avec la position cible) en secondes d’arc pour l’axe DA
Delta DE (‘’) : erreur actuelle (écart avec la position cible) en secondes d’arc pour l’axe DE
Luminosité : information sur la luminosité, il n’y a en fait pas de possibilité de transformer cette valeur en magniture
Taux(s) : taux de correction, dépendant des durées de déplacement, du temps de calcul (de l’ordinateur) et de la durée de pose. Dans ce taux entre aussi le temps nécessaire au télescope pour se déplacer et le temps de calcul de la position. On ne prend une nouvelle image en compte qu’après la durée du calcul et du déplacement du télescope.
CumulAD : somme de toutes les corrections ; permet de voir si l’axe AD tourne trop vite ou trop lentement, l’idéal serait 0.
CumulDE : somme de toutes les corrections ; permet de voir si l’axe DE tourne trop vite ou trop lentement, l’idéal serait 0.
Fichier data: en cochant cette case, vous pouvez enregistrer dans le fichier « Daten.dat » les valeurs suivantes :
Date, Time, Timer, RA_Error, DE_Error, Brighness, RA_Correction, Dec_Correction,
RA_Error_average, DEC_Error_average
Vous trouvez le chemin vers ce fichier dans le menu “Réglages/Options/Divers/Fichier de sortie” ( ?)
Les données signifient :
Date, Time, Timer (durée depuis le temps 0), RA_Error (en asec), DE_Error (en asec), Brighness, RA_Correction (10ms, +/- = direction), Dec_Correction (dito RA),
RA_Error_average (asec si le moyennage est actif) , DEC_Error_average (dito RA)
Un fichier n’est créé que si l’on crée un nouveau fichier et que les données ne sont pas accrochées ( ?)
Si l’on souhaite visualiser l’erreur, sans activer les corrections, on peut désactiver le guidage (décocher la case « Activer le guidage ») ou mettre l’agressivité RA et/ou DE à 0. Il est ainsi possible de faire une mesure de l’erreur périodique.
Le diagramme supérieur montre l’erreur en Ascension droite, celui du bas l’erreur en déclinaison.
On peut régler l’amplitude du graphique du cumul des impacts de guidage en changeant la valeur de la « Résolution» sur 0.5, 1, 2, 5, 10, 20, 50, 100, 200, 500.
Recommandation : 5asec.
Le graphique en bas à gauche montre un agrandissement de l’image principale (10 x 10 pixels).
Sur le graphique à droite de celui-ci, tous les points de mesure sont additionnés. Sur l’axe des X on trouve les écarts en RA et sur l’axe des Y les écarts en DE.
Pour effacer la représentation, cliquer sur le diagramme concerné.
Conseils
Le graphe rond, la cible, est gradué en « résolution du système », en arc.sec de la voûte céleste. Avec une valeur de 5, le rond extérieur est à 5.
Pour évaluer ces valeurs, le logiciel utilise les paramètres saisis par l’utilisateur:
– la taille des pixels du CCD de guidage,
– la focale de guidage.
et ce que voit le CCD:
– une tache de lumière, composée de quelques dizaines de pixels ayant chacun une valeur de 0 à 255.
Résolution (arc.sec/pixel) = 3600 x Arctg [(taille du pixel en micron) / focale (mm)
Le calcul s’applique sur la tache de lumière et en évalue le centroide.
La justesse de ce calcul dépend considérablement de la focale:
– à 300 mm, un pixel représente 3 fois plus d’écart angulaire qu’à 900mm.
Avec la turbulence, le centroide calculé va se balader, même si la tache de lumière apparait parfaitement fixe à l’écran du guideur.
Il faut donc adapter la « résolution » du système (le 5 ou le 10 de la cible) à la focale utilisée en guidage. La résolution d’un 300mm est inférieure à celle d’un 900. Tu mets donc 10 au lieu de 5 et tu vérifies que le nuage de points reste bien centré en cours de guidage.
Ceci montre d’ailleurs les limites d’un guidage avec de trop courtes focale. La focale doit être adaptée au seeing. S’il est mauvais, un 300 mm suffit mais on ne pourra pas imager valablement avec un 3000. Le facteur limitant sera le seeing, pas le 300.
Si le seeing est bon, avec un 300mm on se prive d’une certaine capacité de correction.
8. Dark
Peut être activée, en recouvrant le télescope et en faisant un dark avec la webcam, qui sera ensuite soustrait à toutes les images de la webcam. Il est ainsi possible d’éliminer les pixels chauds qui apparaissent surtout lors des longues poses. Mais cela n’a pas d’influence sur la qualité du suivi. Sauf s’il y a un pixel chaud à proximité immédiate de l’étoile guide.
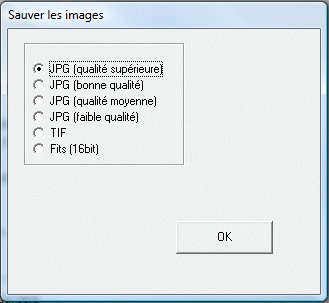
9. Sauver les images
Cette option permet de sauvegarder les images de la webcam dans le format JPEG, TIF ou FITS. Atttention, le disque dur se remplit bien vite.
10. Fichier/Quitter Guidemaster 2
Le programme est interrompu immédiatement, sans demande de confirmation.
11. Mise en station
Cette fonctionnalité n’est pas encore entièrement testée et fonctionnelle. Je serais heureux de recevoir vos premiers commentaires.
Avec cette fonction il est possible d’ajuster la mise en station de la monture (en altitude et en déclinaison) en quelques minutes.
Commencer par faire une calibration très précise de Guidemaster 2 (long temps de déplacement en RA), puis cliquer sur « Mise en sation».
A) Calibration en Azimut
1. Cliquer sur « Axe azimut»
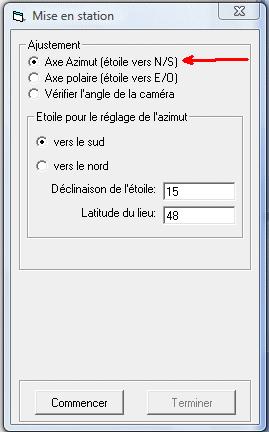
2. Vous devez tout d’abord sélectionner une étoile au Sud proche de l’équateur . Puis vous devez entrer la latitude de votre site d’observation (dans l’hémisphère Nord, valeurs positives) et la déclinaison de l’étoile pointée. Sélectionner la direction de l’étoile (Nord ou Sud). Vous devez entrer les données en degrés DECIMAL en utilisant soit la virgule, soit le point (en fonction des réglages de Windows)
3. Cliquer sur « Commencer»
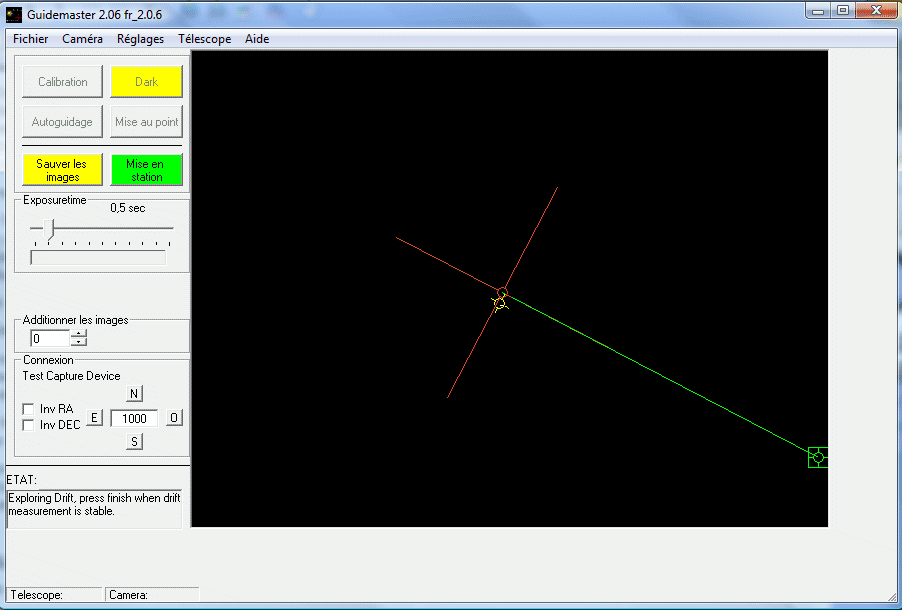
4. Après avoir cliqué, l’étoile sera centrée. Dès que la position centrale est atteinte, la correction sur AD est calculée. La distance en DEC est l’erreur d’alignement. Il y a un champ nommé « correction[amin] » : cette valeur montre l’erreur d’alignement en arc.minute. Au départ cette valeur fluctue fortement, mais avec le temps la valeur se stabilise.
5. Quand la valeur est stable (en général après 1 à 10 minutes), appuyer sur « Terminer »
6. Quand c’est fait, l’étoile est recentrée automatiquement
7. Une fois centrée, vous voyez apparaître un cercle autour du centre et une ligne indiquant la direction de la correction. Dans l’hémisphère Sud, la direction peut être inversée. Si vous utilisez un flip mirror, idem.
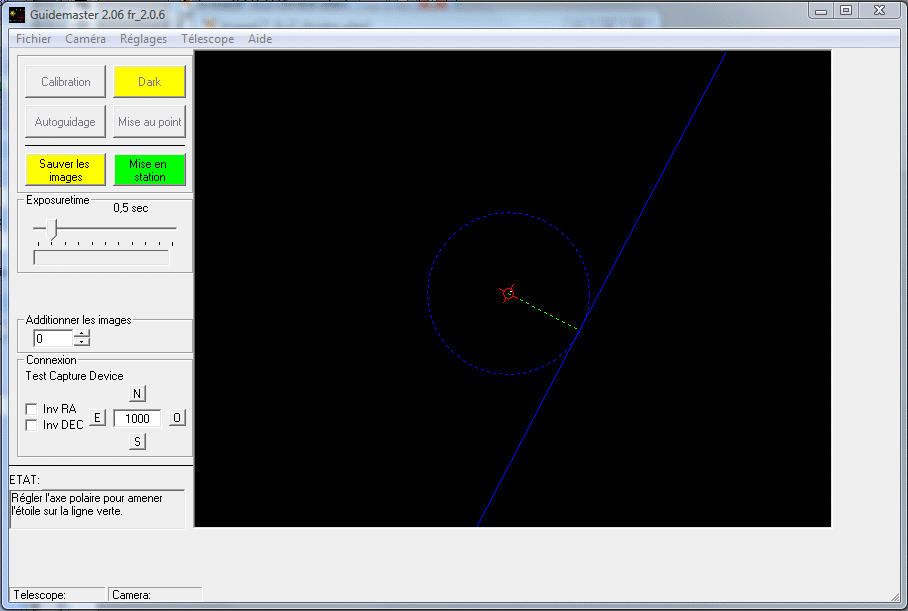
8. Maintenant il vous faut tourner le bouton d’azimut de votre monture et amener l’étoile sur ou près de la ligne du cercle. Une fois que c’est fait, cliquer sur l’étoile.
9. Il peut arriver, si l’erreur de mise en station est importante, que vous deviez répéter l’opération plusieurs fois. Le logiciel vous demande de confirmer. Si vous validez, le logiciel reprend à l’étape 6, sinon l’opération est terminée.
B) Calibration de l’altitude
1. Cliquer sur « Axe polaire»
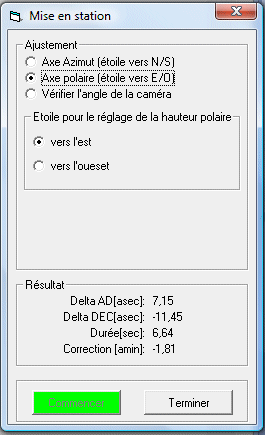
2. Choisissez une étoile à l’Est ou à l’Ouest,
3. Cliquer sur « Commencer »,
4. Après avoir cliqué, Guidemaster centre l’étoile. Quand le centre est atteint, seulement l’axe DE est corrigé. La distance DE est l’erreur d’alignement. Le champ nommé « correction[amin] » donne l’erreur d’alignement.
5. Tout le reste, idem ci-dessus, sauf qu’il faut corriger la hauteur de l’axe polaire sur la monture
Tutorial – Version 2.00
Compilation des fils de discussions concernant Guidemaster sur le forum Astrocoolpix
Si vous trouvez des erreurs ou si vous avez des commentaires, vous pouvez me les adresser par email denis.bailly@laposte.net . Le tutorial sera alors complété ou modifié.
Tutorial basé sur celui de Herbert Kohlmann
TRADUCTION: Denis J. et Denis B.
Une idée : pourrais-tu résumer les points clés de l’utilisation de ce logiciel, les choses les plus importantes pour le paramétrer. Ca permettrait de ne pas avoir tout à lire et de se plonger dans les détails que si quelque chose ne marche pas comme prévu.
Une liste à puces synthétique serait la bienvenue à mon avis. Ensuite, tu présentes le détail de chaque info de la liste à puces.
Bonjour,
Beau travail Denis!!
Ce tuto est vraiment complet, il a répondu à quelques une de mes interrogations.
J’utilise guidemaster avec Pic Astro et HEQ5 (moteur d’origine) depuis plus d’un an et il fonctionne très bien.
David
Justement, si ce tutorial a été réalisé c’est bien pour ceux « qui ne comprennent rien » . 🙂
Je ne suis pas partie prenante du forum allemand.
pensez à ceux qui ne comprennent rien !
Pour info le fil de discussion se trouve ici
http://www.razyboard.com/system/morethread-suggestionforfuturerelease-guidemaster-828751-4786352-0.html
Bonjour,
Une question sur Guidemaster :
Lors d’un passage de nuage devant l’étoile guide, le programme continue à envoyer des impulsions de guidage à la monture et pert l’étoile.. Es que la dernière version de Guidemaster permettrai de bloquer momentanément le guidage puis la reprise de l’autoguidage afin de réaliser de longue pose toute une nuit par exemple.
Merci pour vos réponses.
A+
Jéjé
Peut être en passant par Directx et non par le WDM.
bonjour,
je tente de téléguider avec une camera LPI mais le guidemaster ne me permet pas d’indiquer un temps y a-t’il une solution.merci de bien vouloir me dépanner.
Jacques
Peut-être avez-vous un scanner de branché ?
Je viens egalement de telecharger « Guidemasterv2 » et j’ai le meme probleme au demarrage une fenetre s’ouvre pour me dire que : you have two device drivers . J’ai comme O.S. WinXP et au moment du demarrage qu’une seule webcam connectee. Bien cordialement Jean
En effet, la météo belge ne doit pas laisser beaucoup de nuits d’observation.
Pour le message d’erreur, c’est peut être que Guidemaster « voit » 2 webcams de branchées simultanément.
Avez-vous d’autres périphériques d’installés sur votre Mac ?
Sinon, cela provient sûrement du fait que Windows tourne sur un Mac, le programme y perd peut être son latin même en émulation.
Christian Carez
photographe
Bruxelles – Belgique
Cher Monsieur,
Je viens d’installer Guidemaster 2 et, à l’ouverture, il me signale: « I have 2 device drivers ».
Je ne vois franchement pas à quels drivers il fait allusion et cela peut-il perturber le fonctionnement de l’autoguidage.
Si je me permets de vous importuner avec ce petit problème, c’est que je cumule quelques difficultés: j’ai commencé à pratiquer l’astronomie il y a 4 mois (et avec le climat belge, ça ne fait pas beaucoup de pratique), je commence l’astrophotographie et, cerise sur le gâteau, j’ai du installer Windows sur mon Mac (peu de logiciels Astro en Mac), ce qui ne me facilite pas les choses…
De plus, je pars en vacances (astronomiques) dans les Hautes-Corbières et je n’aurai pas de connection Internet!
Tout cela n’est pas dramatique mais m’a incité à vous poser ce petit problème alors que d’habitude, j’essaie de me débrouiller tout seul.
Merci d’avance de votre aide.
Bien à vous,
Christian Carez