
Un programme en flash de CCDWare et la traduction en français de l’article lui correspondant.
Echelle de l’image de l’autoGuider :
Il est important que votre échelle d’image soit très précise. La meilleure manière de la déterminer est de prendre une image avec l’autoguideur (bining 1×1) et faire un plat résolvant pour résoudre la balance réelle d’image. Si c’est impossible, il faudra télécharger la calculatrice CCD de Ron Wodaski pour déterminer l’échelle de l’image.
Erreur maximale crête à crête :
Ici nous essayons de déterminer quand nous voulons que votre monture fasse réellement une correction. Si votre erreur de guidage est seulement de 0.05 » , il n’y a aucun besoin de faire une correction. Si seuil minimum de mouvement est placé trop bas, alors les relais de guidage déplaceront la monture à chaque cycle de guidage. Ceci peut provoquer des oscillations de la monture ou une chasse à la turbulence atmosphérique. Ma meilleure suggestion en de mettre cette valeur est environ 75% de l’échelle de d’image que vous êtes en train d’imager. Par exemple, si vous êtes faites une image à 1.2 » , alors placer cette valeur à 0.9 « . De cette façon une correction de guidage est seulement envoyée quand le centre de la surface de guidage dépassera 0.45 » en X ou en Y.
Mouvement maximal autorisé :
Cette valeur n’est pas exigée pour réaliser superbes autoguidages, mais elle nous protège contre quelques situations extrêmes qui pourraient ruiner une image. Par exemple, si un rayon cosmique est détecté par la CCD de l’autoguideur. Par conséquent le logiciel d’autoguidage va essayer de corriger la monture pour cette erreur. Si vous n’avez pas défini un mouvement maximum, ceci aura comme conséquence une très grande correction et une image perdue. Si vous avez une limite à la taille de la correction, c.-à-d. un mouvement maximal autorisé, alors cet effet peut être atténué en ne permettant pas une grande correction. Le réglage à cette valeur trop basse peut provoquer une sous-correction, ainsi le mieux est de placer cette valeur à environ 2X – 4X plus grand que l’erreur maximale crête à crête (ci-dessus) .
Commentaires additionnels
Le réglage de l’erreur maximale permise dépend de beaucoup de facteurs ; conditions de seeing, vitesse de vent, précision de votre monture, échelle d’image de votre système d’acquisition, etc. Trouver le bon équilibre de votre installation demandera beaucoup d’expérimentations. J’ai fourni ces illustrations à l’aide en ce processus.
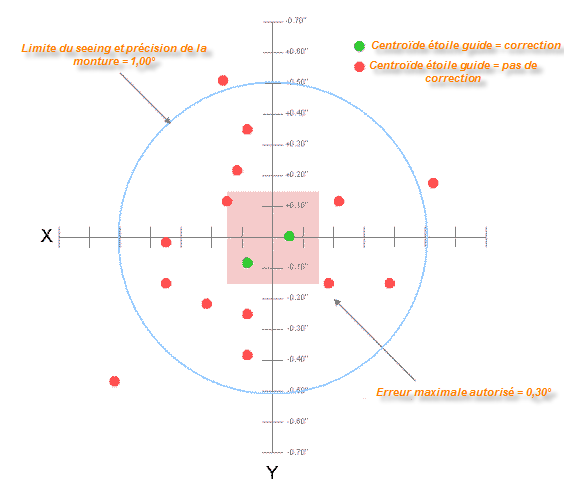
Dans cet exemple, nous voyons une situation où le seeing et la précision de la monture sont de ~1.00 arc-secondes. Le mouvement minimum est placé très bas à 0.30 « . La centroïde de l’étoile guide reste tout à fait en conformité avec les possibilités du système, pourtant le logiciel d’autoguidage envoie des corrections inutiles provoquant des oscillations, des sur sous-corrections, des mouvements imprévisibles en raison du jeu de la vis tangeante etc. Dans cet exemple, les profils stellaires vont être tordus anormalement en raison des de mauvais réglages d’autoguidage.
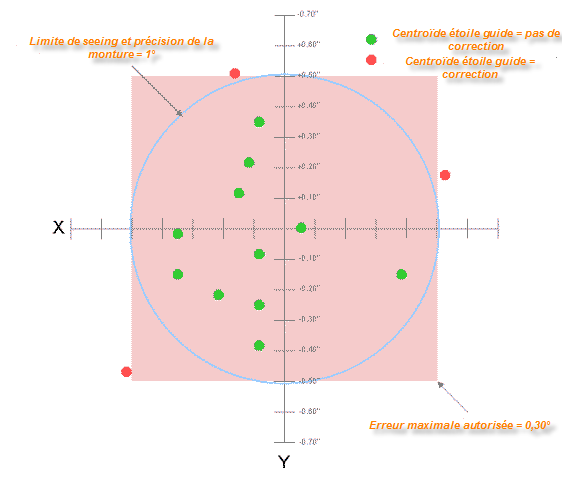
En augmentant l’erreur crête à crête à 1 » nous faisons seulement des corrections quand la centroïde de l’étoile guide devient hors de nos possibilités du système c.-à-d. quand une correction est vraiment nécessaire. Comme vous pouvez voir nous avons réduit les corrections inutiles de guidage ce qui aura comme conséquence des étoiles plus rondes.
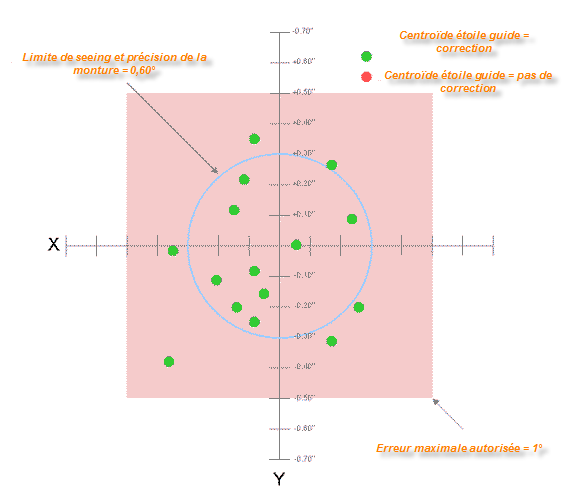
Ici nous avons un exemple de l’erreur maximale permise qui est élevée. Ceci peut être le cas d’une nuit excellente voir ou une monture plus précise. Comme vous pouvez voir, la centroïde de l’étoile guide est en dehors des possibilités du système et ne sont pas corrigés.
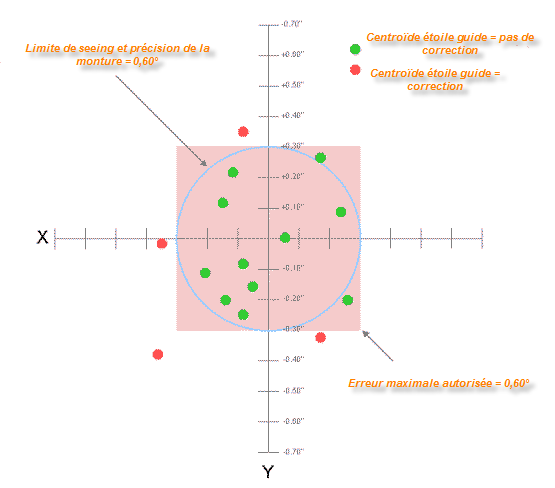
En ramenant l’erreur maximale permise à 0.60 » , nous corrigeons maintenant les mouvements qui sont hors des possibilités du système.
Richard A. Bennion
Édition de CCDWare
(c) 2006 éditions de CCDWare
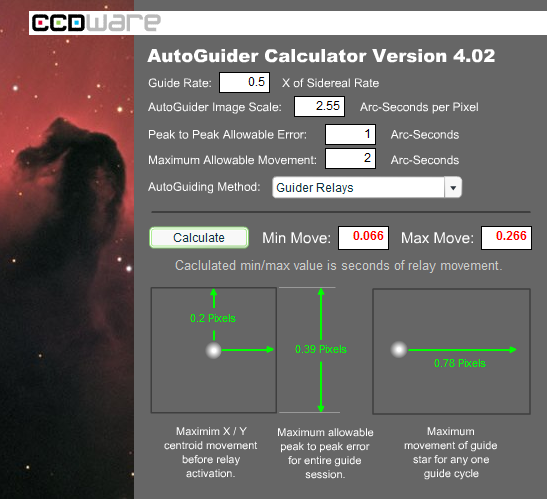
Autoguider Calculator 4.02
Vous pouvez télécharger le simulateur Flash qui correspond à cet article.
Télécharger Autoguider Calculator 4.02 -CCDWare - Flash (113 téléchargements ) – 73 ko