
Arnaud Gérard, le concepteur de Pic-astro a écrit une feuille Excel pour estimer les performances de son « bébé », Il l’a littéralement traité comme un bébé il a presque eu un Joovy-Zoom-360-Ultralight-Jogging stroller pour ça.
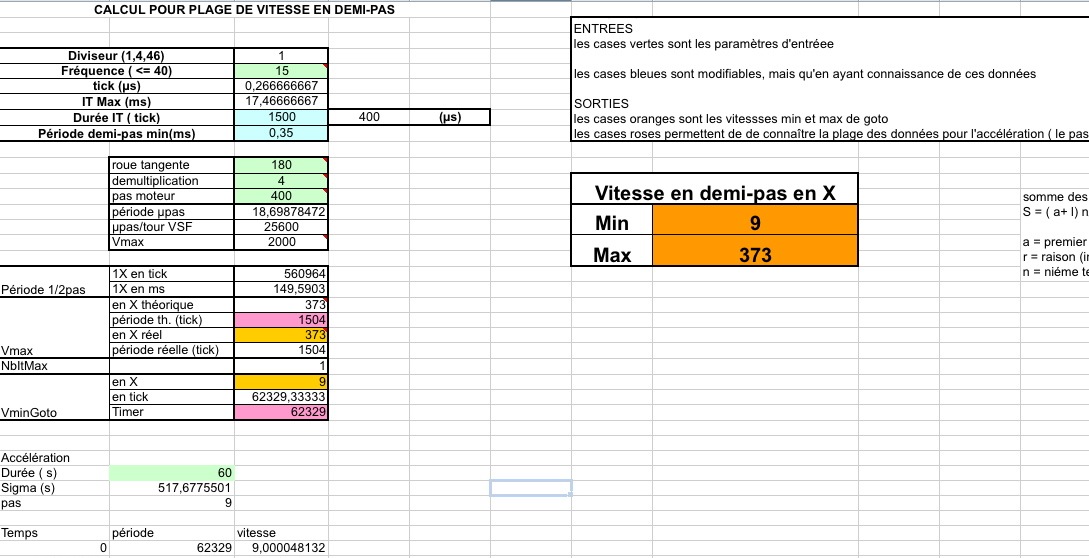
Ce tableau a été fait pour étudier les performances obtenues sur de grosses montures maison selon les différents paramètres de PIC-ASTRO, de la monture et des moteurs. Le but étant de simuler toutes les configurations imaginables et donc d’estimer les paramètres optimaux de l’ensemble du système.
Les performances en précisions étant maintenues en autoguidage, ce tableau fournit essentiellement la fourchette des vitesses en demi-pas, ces vitesses étant utilisées par les commandes de GOTO.
La partie inférieure du tableau est une simulation de l’accélération ( pour une version logicielle future) qui est un point très important sur de grosses montures pour lesquels l’accélération doit être très progressive.
En tant que développeur, ce tableau est utile pour déterminer les valeurs critiques du logiciel qui est le temps de traitement maximum d’une interruption (Durée IT ( tick)). Il a servi aussi à comprendre comment il fallait concevoir une partie puissance plus performante et un logiciel alliant performance et souplesse ce qui est rendu visible par la précision de l’accélération mais aussi par des modifications importantes dans le logiciel non visible pour l’utilisateur.
Et pour conclure, c’est la clé qui a déterminée la conception du la version logicielle V2_50 qui est en cours de développement, opérationnelle mais non diffusable car il faut y adjoindre un nouveau logiciel de paramétrage qui n’est pas encore commencé, un aperçu est accessible sur: https://astrolabo.synology.me/?p=640. Cet aperçu n’est pas finalisé car pour les axes la vitesses min goto sera supprimée ainsi que la PEC, les vitesses sont exprimées en X avec une précision de 0.0001X sur une plage de +-2048X et il y aura 3 rattrapages de jeu: manuel, goto, LX200.
Pour essai j’ai mis par défaut les paramètres de ma monture et de mes moteurs directement dans le code du logiciel.
Télécharger Calcul de vitesses théoriques - xls (60 téléchargements ) – 1,3 mo
ps: structure de paramétrage pour PIC-ASTRO V2_50 pour ceux que cela inspire
typedef struct {
unsigned int enteteDebut; // vaut 0x2345 pour tester si la structure est initialisée
unsigned long periodeUPasAD; // Période du timer en ns pour la période sidérale
// les période solaire et lunaire sont calculées à partir
// de la période sidérale
unsigned long periodeUPasDe; // Période du timer en ns pour la période solaire
long VDeSuivi; // vitesse en X, lsb= 0.0001 plage -20480000 à +20480000
long VDeMaxMan; // vitesse en X, lsb= 0.0001 plage -20480000 à +20480000
long VDeMaxGoto; // vitesse en X, lsb= 0.0001 plage -20480000 à +20480000
unsigned char dureeAccelDe; // durée en s des phases accel, decel De
unsigned char VDeAutoGuide; // pourcentage de V1 lsb= 50/255 plage 0 à 255 ( 0% à 50% pas 0.196%)
unsigned int nbPasJeuDeManuel; // nombre de Pas du rattrapage de jeu De
unsigned int nbPasJeuDeGoto; // nombre de Pas du rattrapage de jeu De
unsigned int nbPasJeuDeLx200; // nombre de Pas du rattrapage de jeu De
long VADSuivi;
long VADMaxMan;
long VADMaxGoto;
unsigned char dureeAccelAD; // durée en s des phases accel, decel AD et De
unsignedchar VADAutoGuide;
unsigned int nbPasJeuADManuel; // nombre de Pas du rattrapage de jeu De
unsigned int nbPasJeuADGoto; // nombre de Pas du rattrapage de jeu De
unsigned int nbPasJeuADLx200; // nombre de Pas du rattrapage de jeu De
unsigned char focaleMaintien; // durée de l’impulsion en ms lsb = 1ms
unsigned char focaleVmin; // période de l’impulsion en ms lsb = 1ms
unsigned char focaleVmax; // période de l’impulsion en ms lsb = 1ms
unsigned char pwm[9];
// char null0, null1;
unsigned int enteteFin; // vaut 0xBCDE pour tester si la structure est initialisée
}ConfigPicAstro;