
Dernier article en provenance du site astrimage.
Pic-astro c’est quoi ?
Vous voici rendus dans une partie du site visant à donner accès aux plus nombreux et aux moins fortunés à un système de pilotage de monture equatoriale allemande basé sur les microcontroleurs PIC, le PicAstro A1. Cette partie comme toutes les autres de ce site est dédiée à ceux qui veulent profiter du ciel sans avoir à vendre leur voiture! Pour un budget inférieur à 150 euros, construisez votre propre système d’autoguidage, Goto, correction périodique et autres merveilles… Encore un très grand merci à Arnaud Gérard pour le développement de ce petit bijou. Vous trouverez dans cette section le manuel de montage complet et les ressources techniques pour construire votre Pic-Astro A1. Nous vous donnons aussi rendez-vous sur astrocoolpix section Pic-Astro A1, l’association et ses astronomes vous accueilleront à bras ouverts et vous guideront.

Pic-Astro : et si votre monture suivait enfin le mouvement de la terre ?
C’est quoi ? Le soleil se lève à l’est et se couche à l’ouest, il se déplace toute la journée. Sur le même principe, la lune, les planètes et les étoiles ont l’air de se déplacer dans le ciel, à cause de la rotation de la terre. Pour compenser cette rotation, les astronomes utilisent des montures équatoriales motorisées. Le Pic-Astro est un montage électronique dont le rôle est de piloter les moteurs pas à pas qui équipent ce type de monture.
Le projet
Le projet Pic-Astro a été entièrement développé par Arnaud GERARD. Il a été intégré totalement à Astrimage et constitue l’une des plus solides fondations de l’association. Astrimage a développé et fédéré la documentation autour de ce projet afin de le rendre accessible à tous. Pic-Astro A1 est désormais proposé sous forme de kit avec des composants de qualité professionnelle grâce au partenariat développé avec le fournisseur de composants en ligne Gotronic et aux commandes groupées.
Pic-Astro, le système d’entrainement universel
Entièrement configurable, Pic-Astro est capable de piloter n’importe quelle monture utilisant des moteurs pas à pas ! Sans l’ordinateur, le Pic-Astro est capable de compenser la rotation de la terre en toute autonomie. Mais le montage révèle sa vraie puissance quand il est connecté à un ordinateur ou à son petit frère Merop. Il est possible alors à partir d’une étoile connue, de déplacer automatiquement le télescope sur n’importe quel objet du ciel. Pic-Astro est capable de comprendre et d’interpréter le protocole aujourd’hui largement standardisé LX200, il est donc reconnu par la plupart des logiciels de cartographie (Cartes du ciel, The Sky , WinStar, etc … ) Une fois l’objet localisé, on peut l’observer mais aussi le photographier en longue pose. En effet, Pic-Astro permet le guidage, soit à l’aide d’un PC ( Iris, Maxim DL , CCD soft , Astroart , … ), soit manuellement à l’aide des boutons de la raquette ou du joystick du Merop.

Pic-Astro : adaptable sur toutes les montures
Pic-Astro, osez un suivi enfin fidèle au mouvement céleste
Pic-Astro est capable de piloter tous les moteurs pas à pas. Il possède une particularité dans son mode de guidage qui en fait un système d’entraînement hors pair. Cette particularité est appréciée par les astro-photographes qui ont des besoins très pointus. En effet, Pic-Astro découpe chacun des pas moteurs en 256 micro pas linéarisés. Il vous offre ainsi un mouvement d’une douceur incomparable tout en conservant la précision des moteurs pas à pas. Vous pouvez constater la différence par vous-même: Vidéo du fonctionnement d’un moteur en 8 micropas par pas (cas des systèmes du commerce):
Vidéo du fonctionnement d’un moteur en 256 micropas par pas avec Pic-Astro:
Pic-Astro va plus loin que les micro-pas en vous permettant de les linéariser de manière paramétrable. Ainsi vous pouvez rendre le déplacement entre chaque micro-pas constant et régulier, en adaptant le signal de commande de Pic-Astro à vos moteurs. L’utilisation du système des micropas donne une précision redoutable à Pic-Astro en auto-guidage et de manière générale en Astro-Photographie, grâce à la finesse du suivi. Il en va, de même, pour le Goto à l’erreur de mise en station près…
Fonctionnalités
Parmi les fonctionnalités de Pic-Astro, les principales sont :
- Emulation du protocole LX200.
- Vitesses entièrement réglables.
- Paramétrage des moteurs pour s’adapter à tous les types de monture et de démultiplication.
- Autoguidage avancé : traitement optimisé des ordres de guidage, réglage et compensation du backslash (jeux mécanique).
- Linéarisation des micros pas moteurs pour obtenir une rotation sans vibration, ni à-coup.
- Correction de l’erreur périodique.
- Vitesses lunaire, solaire, sidérale.
En plus du plaisir de monter le kit vous même, vous aurez un montage aux performances hors du commun, réalisé pour une fraction seulement du prix des systèmes commerciaux. Dans le cas d’une panne éventuelle, Astrimage reste à votre disposition pour vous aider à la résoudre.
Evoluer en toute simplicité
Pic-Astro est totalement évolutif. Comme un ordinateur, vous pouvez mettre à jour son logiciel en toute simplicité : il suffit d’un PC, pas besoin d’un programmateur de microcontrôleurs ou d’outillage coûteux pour réaliser cette opération. Sa configuration,les réglages de tous ses paramètres se fait facilement et rapidement par la même méthode.
Documentation de Montage
Documentation du montage du Pic-Astro A1 - pdf (121 téléchargements )Version 1.4 du 02/01/2010. Cette documentation balaie les points suivants :
- Assemblage du PAD
- Assemblage des circuits Pic-Astro A1
- Liaisons avec le PC et les moteurs
Elle concerne principalement l’assemblage de l’électronique de Pic-Astro.
Documentation de test et de configuration
Notice test de PAA1_1_0.pdf (45 téléchargements ) Notice de paramétrage Pic-Astro logiciel V3.xxx - pdf (63 téléchargements )Ces documentations balaient les points suivants :
- Tester la liaison série de Pic-Astro
- Tinybld et la programmation de Pic-Astro
- Utilitaires de test Pic-Astro
- Pic-Astro et son logiciel de configuration
- Tests sur la monture
Documentation d’utilisation
Notice d'utilisation Pic-astro A1.pdf (70 téléchargements )Logiciel Pic-astro
Voici la dernière version de Pic-astro V3.0 :
Logiciel Pic-Astro V3_00 zip (93 téléchargements )Ici une version plus ancienne, la 2.4
Logiciel Pic-Astro V2 40 zip (48 téléchargements )Logiciels pour réglages des micro pas 15/02/08
Une nouvelle méthode et de nouveaux outils pour ajuster encore mieux les µpas.
Logiciel de réglage des micropas PWM_v4 zip (75 téléchargements )Ici une version plus ancienne au cas où:
Logiciel de réglage des micropas PWM_v3 zip (41 téléchargements )Et la notice :
Notice d'utilisation du logiciel de réglage des micro pas v4.0 - pdf (77 téléchargements )Intégration de PicAstro au système d’observation
Le but premier de l’interface PIC-ASTRO est de piloter une monture EQ5 équipée de ses moteurs d’origine, désormais compatible avec d’autres montures. L’ensemble en fonctionnement est composé des éléments suivants:
- Une monture équatoriale allemande motorisée par des moteurs pas à pas
- L’interface PIC-ASTRO et sa raquette de commande (PAD)
- Une batterie 12V, alimentation secteur ou autre source d’électricité 12V continu
- Un PC pour utiliser les fonctionnalités de Goto
- Une webcam, un PC équipé d’un logiciel gérant l’autoguidage tel Iris ou une caméra CCD gérant l’autoguidage tel qu’une SBIG ST4 ou STV
- Un câble série croisé ( 3 conducteurs) permettant de relier le PC et l’interface PIC-ASTRO
Evolutions Matérielles
Avec l’adjonction de 2 boîtiers TTL standards l’interface autorise, depuis la version 2, la possibilité de commander les moteurs en micro-pas. Ce mode de fonctionnement permet de lisser la rotation de l’axe des moteurs et ainsi d’avoir un mouvement plus doux. La fonction micro-pas est utilisable avec les moteurs d’origine des montures, dans ce cas, elle ne modifie pas les performances. Les micro-pas sont particulièrement bien exploités avec des moteurs pas à pas puissants (ex. : Nanotec ST4209L1704-A) équipés d’un réducteur de 3 à 4. Ce réducteur peut-être réalisé soit avec des engrenages soit avec poulies et courroie. L’intérêt des courroies étant de permettre la supression des Seuils, cette méthode permet d’obtenir une vitesse de GOTO élevée, cette vitesse étant dépendante du moteur utilisé et de la démultiplication. Selon la configuration cette vitesse peut atteindre 1500x la vitesse sidérale mais, afin de ne pas détériorer la mécanique des montures, il est plus sage de ne pas dépasser les 200x, contre une vitesse maximum d’environ 35x la vitesse sidérale avec les moteurs d’origine. Une seconde évolution est la possibilité d’utiliser une des entrées du microcontrôleur pour synchroniser la PEC.
Fonctionnalités astro
L’interface PIC-ASTRO contrôle les moteurs de comme toute raquette classique de contrôle des moteurs de monture. Axe d’Ascension Droite: le suivi est effectué en permanence par le microcontrôleur de manière à compenser la rotation de la terre, les corrections et déplacements peuvent être effectués par le PAD à diverses vitesses. Axe de Déclinaison: les corrections et déplacements peuvent être effectués par le PAD à diverses vitesses. Moteur de mise au point: un interrupteur permet de faire basculer les fonctions des boutons du PAD entre les déplacements sur les axes d’ascension droite et déclinaison ou la commande du moteur de mise au point. La prise en charge des commandes du protocole Meade LX200 permet de commander le système de manière automatique par un PC ou tout autre dispositif capable de communiquer via un port série RS232. Ce protocole permet de donner divers ordres au PicAstro:
- Déplacements sur l’axe d’ascension droite
- Déplacements sur l’axe de déclinaison
- Commande du moteur de mise au point : certains logiciels d’imagerie savent régler de manière autonome ce paramètre.
La prise en charge de ce protocole ouvre la porte vers des fonctionnalités évoluées de Goto, autoguidage assisté par PC, imagerie CCD assistée etc…
Principes de fonctionnement logiciel
Deux grandes parties sont à séparer dans les logiciels utilisés dans PicAstro : Un BootLoader : C’est un tout petit logiciel qui permet au microcontroleur (le « cerveau » de PicAstro) de se mettre en état de comprendre des commandes qui lui sont envoyées via la liaison série qui le relie au PC, et ainsi de télécharger le logiciel par lui-même. Il ne contient aucune logique propre au fonctionnement de PicAstro. L’intérêt d’un bootloader est de n’avoir à programmer qu’une seule fois le microcontroleur, opération qui demande l’utilisation d’un programmateur. Le logiciel PicAstro : C’est le logiciel de gestion de l’interface par lui-même, qui permet de la faire fonctionner, d’interpréter les commandes LX200, de commander les moteurs etc… Il est adapté sur mesure aux caractéristiques intrinsèques de la monture : nombre de dents de la roue dentée, caractéristiques des moteurs, du système de réduction (engrenages, poulie/courroie). Compatibilité et évolutions Pour des raisons matérielles, le logiciel PicAstro V1.XX n’est pas compatible avec la version 2 de l’interface et inversement. Les logiciels prévus pour la version 2 de l’interface PIC-ASTRO sont compatibles avec les moteurs d’origine des montures, et permettent l’exploitation des évolutions matérielles, à savoir principalement la gestion des micropas.
Quelques plus
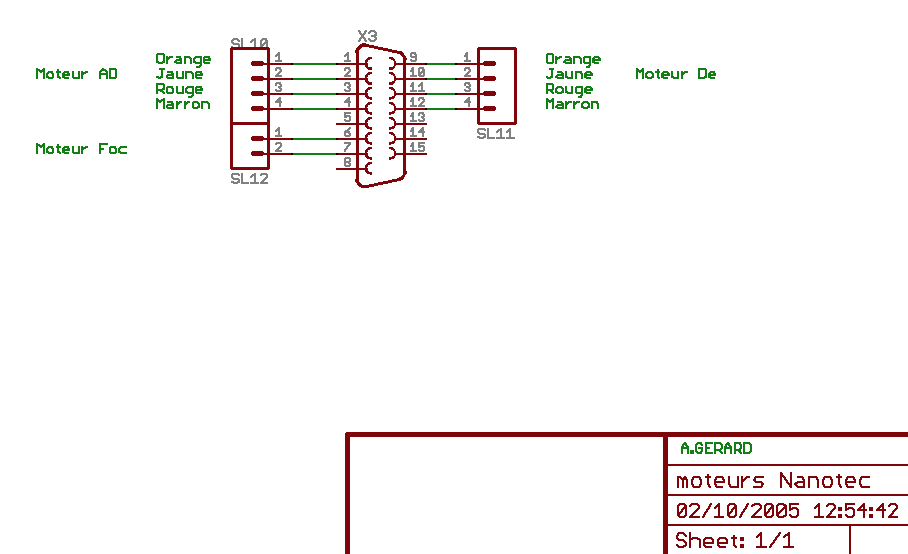
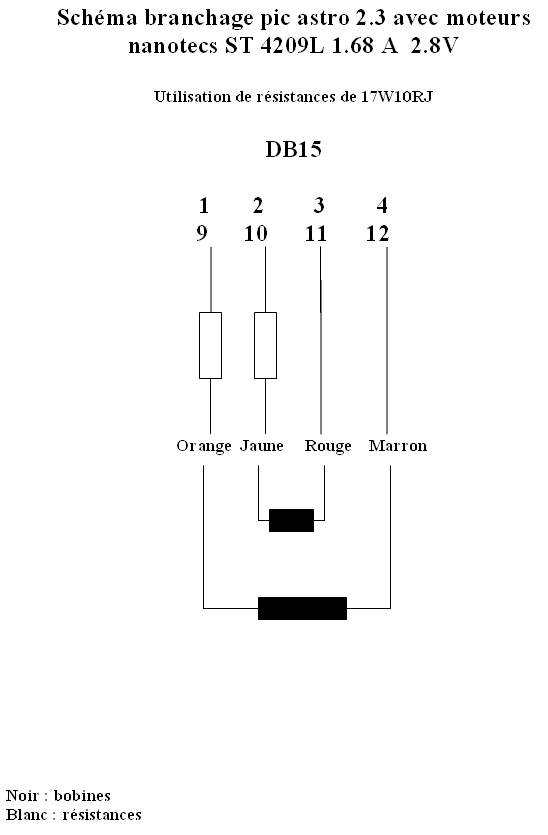
Le câblage des moteurs Nanotec
le fichiers excel adapté à l’EQ6 pour adapter les courroies:
Calcul des courroies pour eq6 - xls (42 téléchargements )
Bonjour Denis et toute l’équipe Astrolabo
Merci pour ce travail récapitulatif concernant PicAstro A1 ainsi que les divers programmes et logiciels nécessaire aux diverses versions. Je suis très intéressé par ceux qui concernent le réglage et contrôle des PWM justement . Mes recherches et essais m’ont amenés à suivre de près tous les posts sur ce sujet. Pour ma part en ce qui concerne le logiciel Réglage PWM j’ai la version PWM_V4_1.zip du 2012-04-11 avec laquelle j’ai fait mes réglages
De même que pour le fichier *.hex de contrôle , j’ai bien celui cité :
– contrôlePWM_V4_15000000.hex de 2007-07-15 qui n’a pas donné satisfaction, mais également :
– contrôlePWM2525_15MHz.hex du 10-05-2010 que j’ai utilisé * , ainsi que:
– controlePWM_V4_10_15MHz.hex du 10-5-2010 non utilisé
– V4_11_2525_15MHz.hex du 12-11-2012 le plus récent que je n’ai pas utilisé non plus.
Celui utilisé (*) et qui m’a permis de faire le réglage, m’a créé un bug en fin de parcours nécessitant de reprogrammer le PIC 18F2525 par deux fois !!
Je ne sais pas s’il est possible de faire le ménage parmi ces versions ? Ce point est pourtant capital si l’on veut avoir une bonne vitesse sidérale notamment avec des moteurs Nanotec de 400pas.
Merci pour votre éventuelle réponse et bravo pour ce site indispensable à la communauté.
Cordialement
Gérard