
Le site Astrimage donnant des signes de faiblesse et vu que plus personne ne semble s’en occuper, je me permets de stocker les articles les plus intéressants.
Changer de moteurs et de système de transmission
Sources d’erreurs d’une monture Les moteurs d’origine, malgré leur prix parfois prohibitifs dans la plupart des cas associés à des blocs moto-réducteurs (ensemble d’engrenages) qui permettent d’adapter la vitesse de rotation du moteur à celle du mouvement sidéral. Toute liaison mécanique par engrainages induit une erreur périodique : si nous considérons un système composé de deux roues dentées comme deux roues à friction de diamètre égal au diamètre primitif de chacune des roues dentées, nous pouvons nous rendre compte des problèmes qui se produisent suivant la précision de la rotondité des deux roues :
Tout se passe comme si la roue passait progressivement du rayon L1 au rayon L2, faisant varier proportionnellement la démultiplication d’un maximum à un minimum, de 1,1 à 0,9 par exemple, et ce de manière périodique puisque le phénomène se reproduira à chaque rotation de la vis, soit une période de 10 minutes dans le cas de la vis sans fin d’une monture de type EQ5/SPDX. Ceci induira de manière périodique des avances et des retards dans la vitesse de rotation transmise, en astronomie ce problème est connu sous le nom d’erreur périodique, il est créé par le système roue dentée/vis sans fin. Dans un système sans friction et sans imprécision autre que l’aberration de rotondité des roues dentées, nous pourrions mesurer une erreur périodique de forme sinusoïdale :
Cette erreur est tout à fait périodique et donc prévisible. Ceci signifie qu’un système de compensation d’erreur périodique (PEC) serait tout à fait à même de rattraper la variation douce de la vitesse en sortie des deux roues dentées en dosant proportionnellement celle du moteur en entrée. Pour rendre plus réelle cette modélisation d’erreur périodique il convient d’ajouter divers phénomènes qui la rendent de plus en plus aléatoire, et donc de moins en moins prévisible et périodique. En fait tout élément de la chaîne de transmission du mouvement apporte une plus ou moins forte contribution à la déformation de celui-ci. Les principales déformations supplémentaires sont toutefois dues en majeure partie aux blocs moto-réducteurs (boîte d’engrenages) dont les différentes vitesses de rotation, jeux, frottements et surtout vibrations induisent des composantes supplémentaires au mouvement de rotation initial. Voici un exemple d’erreur périodique mesuré sur une monture de milieu de gamme, une Vixen GP-DX dont la mécanique n’a pas été modifiée:
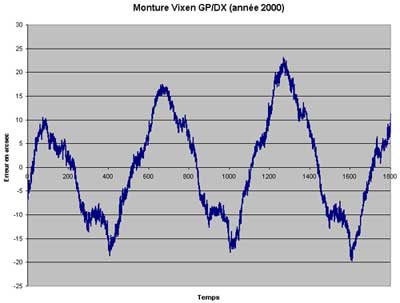
Source : Base de donnée des montures C. Demeautis http://www.astrosurf.com/demeautis/ep/pe.htm
Améliorer sa monture Comme nous venons de le voir, la clé permettant de s’approcher d’un suivi de plus en plus parfait malgré la présence inévitable d’erreur périodique est la reproductibilité de ces erreurs. Un système particulièrement efficace peut apporter des résultats tout à fait exceptionnels à ce type de problèmes : remplacer l’entraînement original par par des moteurs précis, puissants couplés à la vis sans fin par un système de poulies/courroies :

Les moteurs et poulies/courroies de bonne qualité sont relativement onéreux, mais gardez bien à l’esprit qu’un système complet de ce type reste moins coûteux que le système d’origine de motorisation de bien des montures. Les principaux avantages sont :
- Suppression totale des harmoniques de haute fréquence de l’erreur périodique dues aux moto-réducteurs
- Réduction drastique des jeux, ouvrant la possibilité de les compenser précisément par Pic-Astro et offrant la précision nécessaire pour l’autoguidage, les pointages par Goto etc.
- Obtention d’une erreur réellement périodique, très proche d’un modèle théorique et donc très douce. La correction d’erreur périodique devient alors redoutablement efficace.
Voici le résultat obtenu avec ma monture Vixen SP-DX (ancêtre pas si lointaine de la GP-DX, de conception identique) :
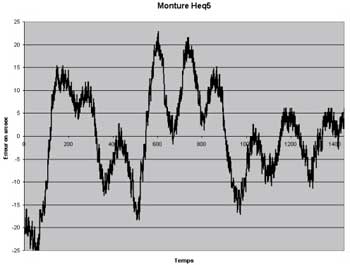
Source : Base de donnée des montures C. Demeautis http://www.astrosurf.com/demeautis/ep/pe.htm
Nous pouvons voir sur cet exemple que l’erreur de suivi de la monture n’est plus périodique : même si elle se reproduit toutes les 600 secondes (temps d’un tour de vis sans fin), son amplitude n’est pas prévisible et un système de PEC ne permettrait pas de corriger efficacement celle-ci. Toute la problématique dans le suivi d’une monture équatoriale allemande se résume donc dans les points suivants :
- Le système d’entraînement par vis sans fin / roue tangente induit une erreur périodique plus ou moins douce suivant la qualité des composants mécaniques
- Si cette erreur est reproductible, alors il est possible idéalement de l’annuler par un système de PEC
- Les jeux d’engrenages qui peuvent survenir à tous les niveaux sont des facteurs supplémentaires de détérioration du suivi mais peuvent être aussi une sérieuse entrave au guidage, et à fortiori à l’autoguidage
La clé de la compensation de ces erreurs mécaniques par de l’électronique est la reproductibilité. Exemple d’erreur périodique totalement imprévisible :
Une autre source importante d’amélioration et de lissage du suivi est l’utilisation de Micro-pas, permise par des moteurs de qualité. La motorisation de toute monture équatoriale allemande digne de ce nom se fait par l’intermédiaire de moteurs pas à pas. Ces moteurs ont la particularité de faire tourner l’axe par « pas », donnant au mouvement de rotation une dynamique saccadée semblable à celle de la trotteuse d’une horloge. Ce déplacement saccadé est bien suffisant dans la plupart des cas, mais lors d’une utilisation photographique par exemple il devient crucial d’avoir un suivi qui soit le meilleur possible. Il est alors intéressant de chercher à adoucir ces saccades et dans l’idéal de parvenir à rendre la rotation de l’arbre du moteur régulière. Dans un moteur pas à pas, c’est le champ magnétique qui tourne autour du rotor (partie tournante du moteur), et il le fait précisément par pas. La solution serait donc de rendre ces pas de plus en plus petits en les découpant en demi-pas et pourquoi pas en micro-pas. C’est ce que Pic-Astro fait superbement en ajoutant la cerise sur le gâteau : la linéarisation de ces micro-pas, c’est-à-dire que la quantité de déplacement entre chaque micro-pas (1/16 de pas) est réglable de manière à être toujours la même ! Ceci contribue fortement au lissage de la courbe d’erreur et donc amène la qualité de suivi à un niveau tout à fait exceptionnel. Les moteurs jouent donc bien entendu un rôle crucial dans la qualité du suivi, leurs principales caractéristiques sont les suivantes :
- Nombre de pas par tour. Par exemple 48 pour les moteurs d’origine de la SPDX, 400 pour les moteurs Nanotec qui ont été utilisés pour la transmission par poulie/courroie
- Couple : c’est la puissance du moteur. Plus il est puissant, moins il se laissera ralentir, perturber ou vibrer par de petits défauts de la mécanique.
- Tension/Intensité d’alimentation
- Taille : très important pour l’adaptation sur une monture où l’espace est compté!
Dimensionnement du système Intéressons-nous maintenant à la méthode à suivre pour modifier votre monture. Choix du moteur Les principaux critères à prendre en compte dans le choix des moteurs sont ceux évoqués ci-dessus, mais il est très important de se poser les questions suivantes :
- Quel est l’encombrement maximal que peut supporter la monture pour accueillir les moteurs ? Dans le cas de moteurs d’origine encastrés comme dans le cas d’une monture HEQ5/EQ6 il est possible de modifier le logement des moteurs et de supprimer l’électronique qui sera remplacée (avantageusement !) par Pic-Astro.
- Quel est le couple nécessaire pour votre monture ? Idéalement, plus les moteurs auront du couple et mieux ce sera.
- Quelle est la puissance maximale délivrable par la batterie ou l’alimentation dont vous disposez pendant le temps de vos observations?
Les moteurs Nanotec ST4209-L1704 ont été choisis et testés avec grand succès par nombre d’utilisateurs Pic-Astro. Ils ont permis en conditions de test de faire des déplacements de monture à 1500x la vitesse sidérale ce qui confirme leur couple. Ces moteurs associés à des poulies/courroies ont permis d’obtenir la courbe d’erreur périodique citée en exemple ci-dessus. En pratique ils sont utilisés à 100-200x la vitesse sidérale, ce qui décoiffe réellement par rapport aux 37x max autorisés par les moteurs d’origine. Voici leurs caractéristiques:

Ces moteurs peuvent être commandés directement depuis le site de Nanotec : http://www.nanotec.de Choix des poulies/courroies En ce qui concerne le choix des poulies/courroies, les questions suivantes sont à se poser :
- Quel est l’encombrement maximal que peut supporter la monture pour accueillir les poulies, tout en conservant un maximum de libertés de mouvement et sans risquer un choc susceptible de détériorer les poulies/voiler la vis sans fin.
- Quel est l’entraxe maximal acceptable pour pouvoir positionner à la fois les moteurs et les poulies?
- Quel est le rapport de démultiplication idéal pour utiliser une correction d’erreur périodique avec Pic-Astro?
Le fichier Excel Courroies_V2-1.xls présent dans la partie « Docs. Montures » du site effectuera pour vous une bonne partie des calculs à votre place, laissez-vous guider.
Réglage de la vis sans fin
Problématique La vis sans fin est l’élément clé de la transmission du mouvement sur une monture équatoriale. C’est d’elle et de ses réglages que vont dépendre les jeux et les erreurs de suivi, facteurs clé notamment en astrophotographie, mais la douceur de leur rotation sera également un élément clé lors de l’utilisation de Goto et des moteurs en général. Certaines montures arrivent du fabricant avec divers défauts de réglage et de graissage, ou tout simplement votre monture se dérègle avec le temps et il est nécessaire de re-régler celle-ci. Cette opération est relativement délicate, aussi la règle d’or est la suivante : si tout fonctionne, ne touchez à rien ! Une fois la vis sans fin de la monture nettoyée et correctement graissée à l’aide de lubrifiants adaptés tels que graisse au lithium, graisse siliconée etc, toute la subtilité du réglage réside dans une problématique simple : Pouvoir appliquer suffisamment de force sur la vis sans fin pour assurer un bon contact avec la roue dentée sans l’écraser. Les conséquences d’un mauvais réglage sont les suivantes : Vis sans fin trop serrée
- Déformation parfois irréversible de la vis sans fin
- Apparition de vibrations de fréquence haute sur l’erreur périodique
- Augmentation de l’erreur périodique pouvant aller jusqu’au double en conséquence de la déformation de la vis sans fin
- Augmentation de la dureté du mouvement de la vis pouvant aller jusqu’à empêcher un moteur même avec un couple très fort de la faire tourner
Vis sans fin pas assez serrée
- Jeux d’engrenages (backlash) pouvant être impressionnants dans l’entraînement
- Jeu sur les axes pouvant permettre de bouger le tube optique à la main sur plusieurs dixièmes de degrés
- Item 3
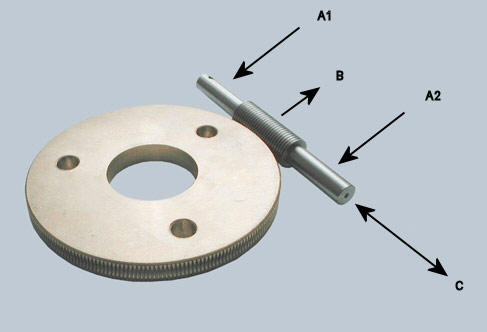
Le réglage Généralement, votre monture dispose des éléments de réglages suivants :
- 2 vis de serrage de la vis sans fin sur la roue dentée : A1 et A2
- 1 vis de blocage pour les deux précédentes : B
- Un ensemble vis/contre écrou de réglage du jeu latéral : C
La procédure de réglage consiste à :
- Serrer doucement les vis A1 et A2 afin d’amener la vis sans fin en contact avec la roue dentée
- La vis B étant desserrée, vous allez sentir très rapidement une dureté dans la rotation de la vis sans fin, il faut alors serrer la vis B jusqu’à arriver au point où le mouvement revient fluide
- Répétez maintenant les deux premières étapes jusqu’à trouver le point d’équilibre du réglage où le mouvement de la vis reste très fluide tout en se trouvant légèrement au-delà du point où le mouvement était dur (vis trop serrée).
- Serrez la vis C et son contre-écrou de blocage de manière à éliminer le jeu latéral de la vis sans fin. Vous pouvez « sentir » le jeu latéral en touchant l’axe de la vis sans fin et en faisant tourner celle-ci dans un sens puis dans l’autre avec l’autre main.
- Contrôlez le jeu résultant de cette opération en manipulant frein bloqués les axes AD et DE, normalement aucun jeu ne doit être perceptible.
- Contrôlez maintenant les jeux en observant un point fixe à fort grossissement (200x) et en tournant la vis sans fin alternativement dans les deux sens, vous allez pouvoir vous rendre compte de la nécessité ou non d’affiner le réglage.
Note importante : les jeux sont nécessaires dans toute liaison mécanique permettant des axes de libertés (rotation, translation), ne cherchez pas à les éliminer totalement, vous risquez d’endommager votre monture. Exemples de roue dentée et vis sans fin sur une monture Vixen SPDX :

